Introduction
BearMaps is a two-part project. Project 2 is the first part, and Project 3 is the second part.
This project is a web mapping application, inspired by my time on the Google Maps team and the OpenStreetMap project, from which the tile images and map feature data was downloaded. You are working with real-world mapping data here that is freely available - after you have finished this project, you can even extend your code to support a wider range of features. You will be writing the back end - the web server that powers the API that the front end makes requests to.
By the end of this project, with some extra work, you can even host your application as a web app, like we have here. It is hosted for free on Heroku. For better performance, shrink your window.
Meta Advice
This spec is not meant to be complete. Many design decisions are left to you, although with suggestions given. Many implementation details are not given; you are expected to read the entirety of the skeleton (which is well-commented or self-explanatory) and the javadoc to determine how to proceed. You will especially want to read all the constants defined.
However, the spec is written in a way so that you can proceed linearly down - that is, while each feature is partially dependent on the previous one, your design decisions, as long as they are generally reasonable, should not obstruct how you think about implement the following parts. You are required to read the entire spec section before asking questions. If your question is answered in the spec, we will only direct you to the spec.
Modularize. Make sure to split your program into multiple logical parts. Here's what my setup looks like: 
I don't mind if you copy it or do something similar.
Getting the Skeleton Files
For this project we very strongly recommend using IntelliJ. If IntelliJ doesn't work on your computer, or is too slow, consider using IntelliJ on the lab machines. If you insist, you can also use the command-line / terminal on your personal machine as further described in Addendum for Terminal users.
Pull the skeleton using the command git pull skeleton master. Then, please download this zip file; it is the image tile dataset. Unzip it into your proj3/ folder such that there is an img/ directory, with all the png files in it. There are around 50,000 files in this folder, so it might take a bit of time to unzip. This is gitignored by default. Do not force add it to your repository.
You should also download the test data and example output. These will be gitignored by default. Do not add them to your repository.
This project uses Apache Maven as its build system; it integrates with IntelliJ. You will want to create a new IntelliJ project for project 3. In IntelliJ, go to New -> Project from Existing Sources. Then:
- Select your project folder, press next, and make sure to select "Import project from external model" and select Maven. Press next.
- At the Import Project window, check: "Import Maven projects automatically".
- Press next until the end.
- It is possible that IntelliJ will not "mark" your folders correctly: Make sure to mark, if not done so already, the
src/main/javadirectory as a sources root, thesrc/staticdirectory as a sources root, and thesrc/test/javadirectory as a test sources root. To do this, right click on the folder in the explorer window (the tab on the left), and towards the bottom of the options you'll see "Mark Directory As". - You do not need to add the course lib to your IntelliJ library. You will not need it and it may cause conflicts. This also means that you cannot use any libraries outside the Java standard library and the ones already included in the project.
Build the project, run MapServer.java and navigate your browser (Chrome preferred; errors in other browsers will not be supported) to localhost:4567. This should load up map.html; by default, there should be a blank page with some UI elements. You can also run MapServer.java and then open up src/static/page/map.html manually by right clicking and going to Open In Browser in IntelliJ.
If you get a 404 error, make sure you have marked your folders as described in step 4 above.
Absolutely make sure to end your instance of MapServer before re-running or starting another up. Not doing so will cause a java.net.BindException: Address already in use.
Addendum for Terminal users
If you do want to use it through the command line here are some basic instructions:
Windows users: Follow the instructions here, making sure to adjust them to your machine which should already have JDK8 installed. Use command prompt, not git bash.
Mac users: brew install maven
Ubuntu users: sudo apt-get install maven.
You can then use the mvn compile and mvn exec:java -Dexec.mainClass="MapServer" targets to run MapServer, after patching your pom.xml to include src/static as a sources root. Do so by renaming pom_alternate.xml to pom.xml. You can also run the tests with mvn test.
Choosing to work through terminal may slow down your development cycle considerably as you will not have access to the debugger.
Overview
We will be working with longitudes (x-axis) and latitudes (y-axis); because these metrics are defined using the Mercator projection, the latitudes will be slightly distorted over long distances.
We will instead only work inside a small world-region, the area surrounding Berkeley; this makes latitude distortions largely trivial and prevents you from having to deal with more complex math in your calculations. Essentially, this allows you to interpret lon and lat as x and y coordinates, and distances as linear, which is good for linear interpolation. You should note that latitudes and longitudes do not scale the same as a per-pixel amount.
Application Structure
Your job is to implement a web API. You will write a web server that hosts some endpoints that take in parameters and provide output in JSON. This might not make very much sense: let's look at a quick example:

It is the job of the web server to parse the URL and generate the output. The web server listens on a port and runs a loop that handles each of the incoming connections / requests. Fortunately, we don't have to write any of the interfacing code; we will be using Java Spark as the server framework; you don't need to worry about the internals of this as we are providing the skeleton code to handle the endpoints.
We are also providing you with a file, map.html, in src/static/page, which implements a basic front-end user interface. This basic Javascript application makes the necessary API calls to render a map that can be navigated around and can show routes and locations.
Testing
AGMapServerTest.java in src/test/java is a local version of our autograder that you can run. It takes in serialized validation data from test_data and checks your results against it. You are not recommended to use this to drive your development; it's to give you a sense of expected outputs based on inputs. Effective strategies for debugging do not include: running the JUnit tests over and over again while making small changes each time, staring at the error messages and then posting on piazza asking what they mean before reading the whole message and trying to interpret it; effective strategies include: using the debugger; reproducing your buggy inputs; rubber ducky debugging. You can feel free to modify this file as you want.
You will also find your browser's Javascript console handy, especially when opened on map.html: for example, on Windows, in Chrome you can press F12 to open up the developer tools, click console, and enter in params to get the value of the current query parameters for the map, and route_params to get the value of the current query parameters for your route. It should look something like this:
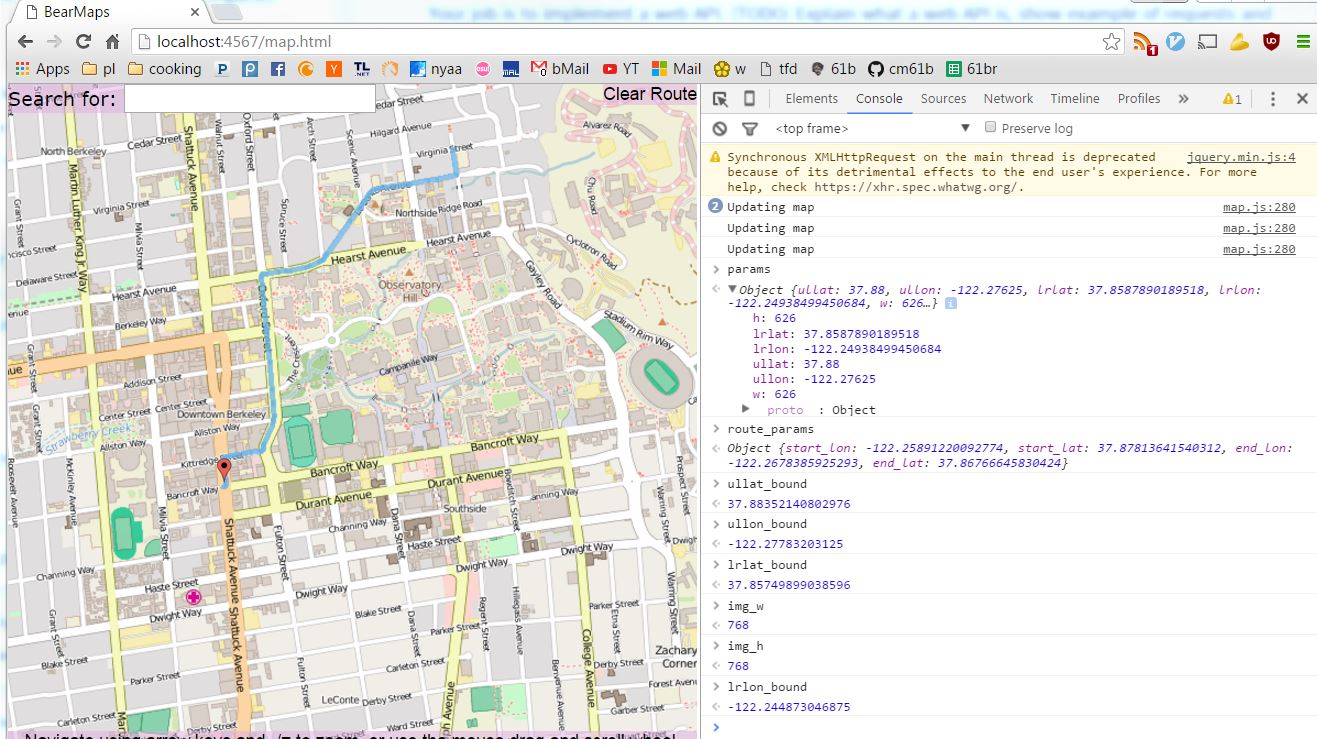
Additionally you can use Postman Interceptor. It's a Chrome extension with a good visual interface for setting up queries, tracking requests made by your browser, and modifying params and examining responses. It's an industry standard and I highly recommend it.
API Documentation
We support four GET endpoints. The request handlers defined in MapServer.java process the HTTP GET request, pulling out the requests' required attributes and values into a Map<String, Double> and dispatches the work to methods that you implement. See the MapServer::main method and read the code: these are the various request handlers that dispatch work to the methods below and are called every time the HTTP endpoints are requested. These methods must satisfy the requirements given in the Javadoc.
You will want to read through the Javadoc. It describes all the requirements for implementation, and defines the inputs and outputs of each method. Additionally, you will want to read through the comments in the skeleton code. They explain how the server handlers invoke your methods and encode the responses. You may also find the Javadoc in the skeleton code.
Optionally, you can read through map.html, map.css, and map.js. They are not an example of good web design style, but you can see how the front-end makes the API calls.
Map Rastering
Rastering is the job of converting some information to a bit-mapped, pixel-by-pixel image. In this part, given our dataset, we raster images that fill an intersection window.
Mapping Data
A quadtree is a tree data structure typically used to represent spatial data. A node is a square in the plane; for this project, each square node will be called a tile interchangeably, and is defined by its upper left and lower right points. Unlike a Binary Tree, a node has four children; each child is a subdivided fourth of its parent, as shown below.
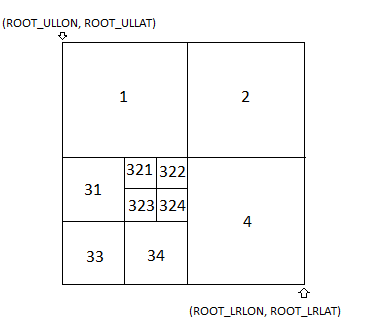
You are provided map data in the img directory as a large set of 256x256 png image files, which I will call tiles. The filename determines the relationship between one tile and another, as shown above. Each quad-tree node corresponds to an image tile. 11.png, 12.png, 13.png, 14.png are the four quadrant subdivisions of 1.png and so on. The longitudes and latitudes of the root node, which is to be subdivided, are given to you as constants ROOT_ULLAT, ROOT_ULLON, ROOT_LRLAT, ROOT_LRLON.
For example, the upper left child of the root, represented by 1.png, shares an upper left longitude and latitude with the root, but has a lower right longitude and latitude that is at the center of the root tile, and so on - the structure is defined recursively. If a tile has no children, for example 4444444.png, there are no valid files 44444441.png, 44444442.png, and so on.
For a demo of how all this works, see this FileDisplayDemo. Try typing in a filename, and it will show what region of the map this file corresponds to, as well as the exact coordinates of its corners, in addition to the distance per pixel.
This helps construct the map since all tiles are the same resolution; you might think of traversing to a child of a node as "zooming in" on that quadrant.
Lazy Loading
To ensure that your program does not gobble up excessive amounts of memory, do not load all the images in the img/ directory into memory as BufferedImages or in any other way until they are needed for a raster (don't instantiate the BufferedImage on construction, only on raster as needed).
Rastering
Implement getMapRaster as described in the Javadoc. You do not need to worry about routing until the next part. When the client makes a call to /raster with the required parameters, the request handler will validate that all the required parameters are present (as declared in REQUIRED_RASTER_REQUEST_PARAMS. Then, in the Map params, those parameters are keys that you will be able to get the value of: for example, if I wanted to know the upper left point's longitude of the query rectangle, I could call params.get("ullon").
Let us define a metric, the distance per pixel. Treat the (lon, lat) of some point on the map the same as an (x, y) point. Then the longitudinal distance per pixel covered on a tile is just (lower right longitude - upper left longitude) / (width of the image). This defines how fine or coarse the resolution of a tile is. If we cover a lot of distance per pixel on a tile, then that means the tile is more zoomed out and closer to the quadtree root; if we cover less distance per pixel, then that means the tile is more zoomed in (corresponding to being lower in the quadtree). Note that the longitudinal (horizontal) distance per pixel is not the same as the latidudinal (vertical) distance per pixel because the earth is curved. If you use the wrong one, or use them interchangably, you will have incorrect results.
To see how the distance per pixel changes as you go down in the tree structure, take a look back at the FileDisplayDemo.
Querying & Collection
If you've represented your tile hierarchy as a quadtree, you are looking to collect all tiles that intersect (overlap) the query window that have a depth that is as close to the root as possible, but still satisfy the condition that the tiles should have a longitudinal distance per pixel less than or equal to the longitudinal distance per pixel in the query box. This enforces that one pixel in the query box is covered by at least one pixel in the rastered image - we want to be as zoomed out as possible, but don't want to give an image smaller than the width and height given in the query box, but we don't want our image to be the maximum resolution either.
Let's first understand the motivation for why it should work like this with an example. Suppose we have params = {ullon=-122.241632, lrlon=-122.24053, w=892.0, h=875.0, ullat=37.87655, lrlat=37.87548}. This means the user needs to see everything between longitudes -122.241632 and -122.24053 degrees, and latitudes 37.87655 and 38.87548 degrees. This is the query box in world space. Additionally, because of the width of the user's window, 892 pixels, the user expects an image that covers approximately (122.241632 - 122.24053) / 892 = 1.23e-6 degrees per pixel.
The two requirements enforced, as described above, is that we must make the best effort to collect tiles that overlap (and thus filling up the query box), and we must have enough pixels covered per degree (note the inversion).
Suppose we use just 2.png. It would look like this:
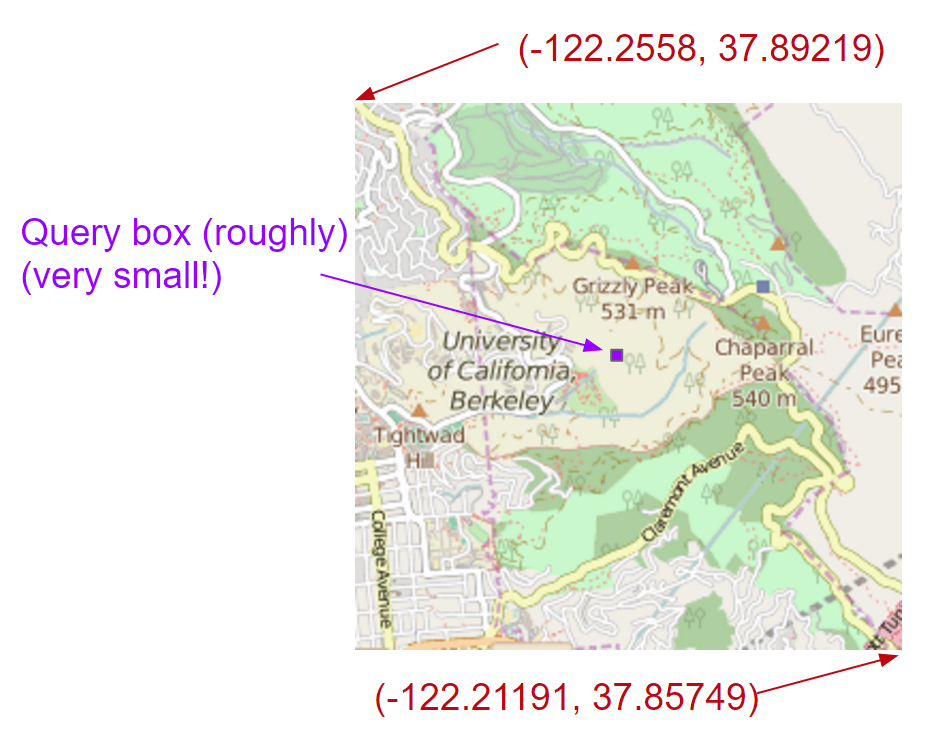
Notice how small the query window is. In this case, we've covered the query window with a result, but the resolution is far too low. Suppose we use 21.png instead, and by doing so we zoom in on one quadrant:
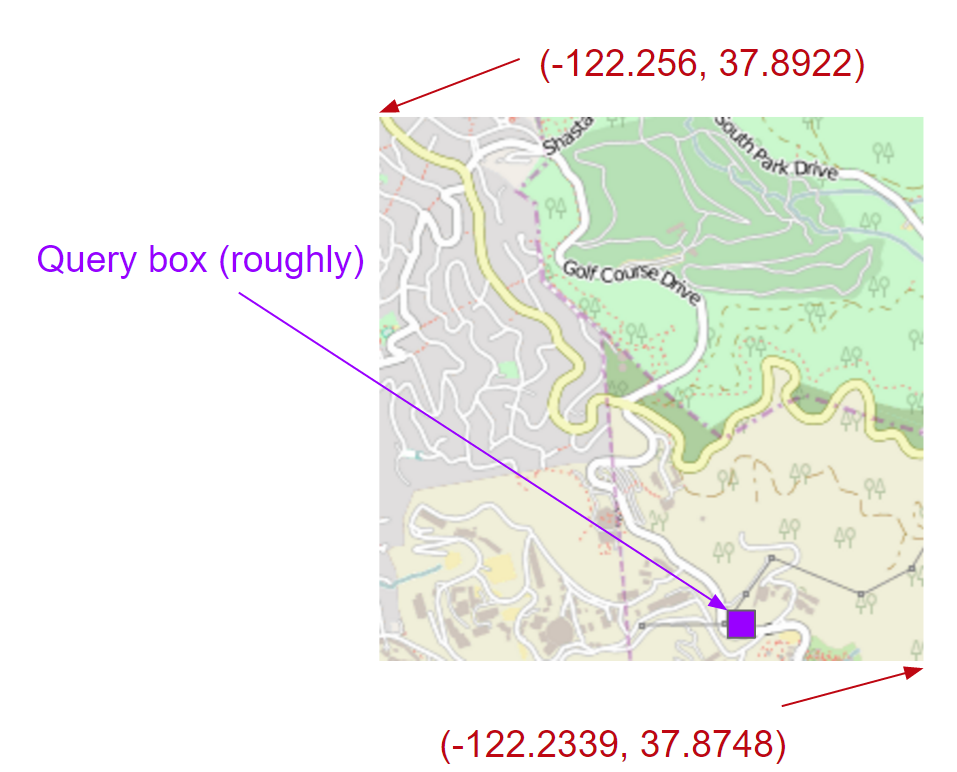
The query box is still too small, but we've improved. If we zoom in tile by tile all the way until the distance per pixel requirement is satisfied, we end up with something like 2143411.png (which is the best we can do - we can't exactly meet the requirement, but it's a leaf), which looks like this:
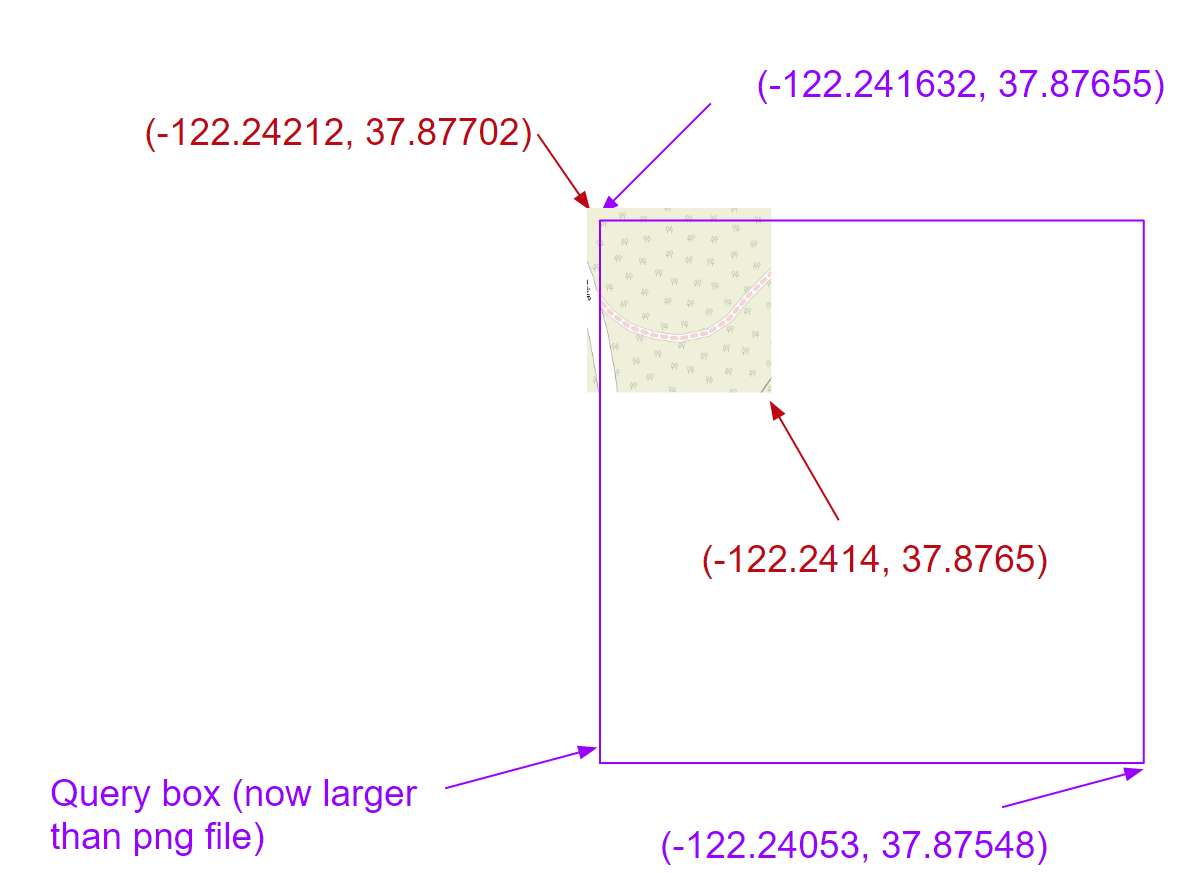
Now the resolution is good enough, but we can't cover the entire query box; thus we need more images.Using 2143411, 2143412, 2143413, 2143414, 2143421, 2143423, 2143431, 2143432, and 2143441, we can tile together these 9 images to look like this, and cover even a bit more than the query window:
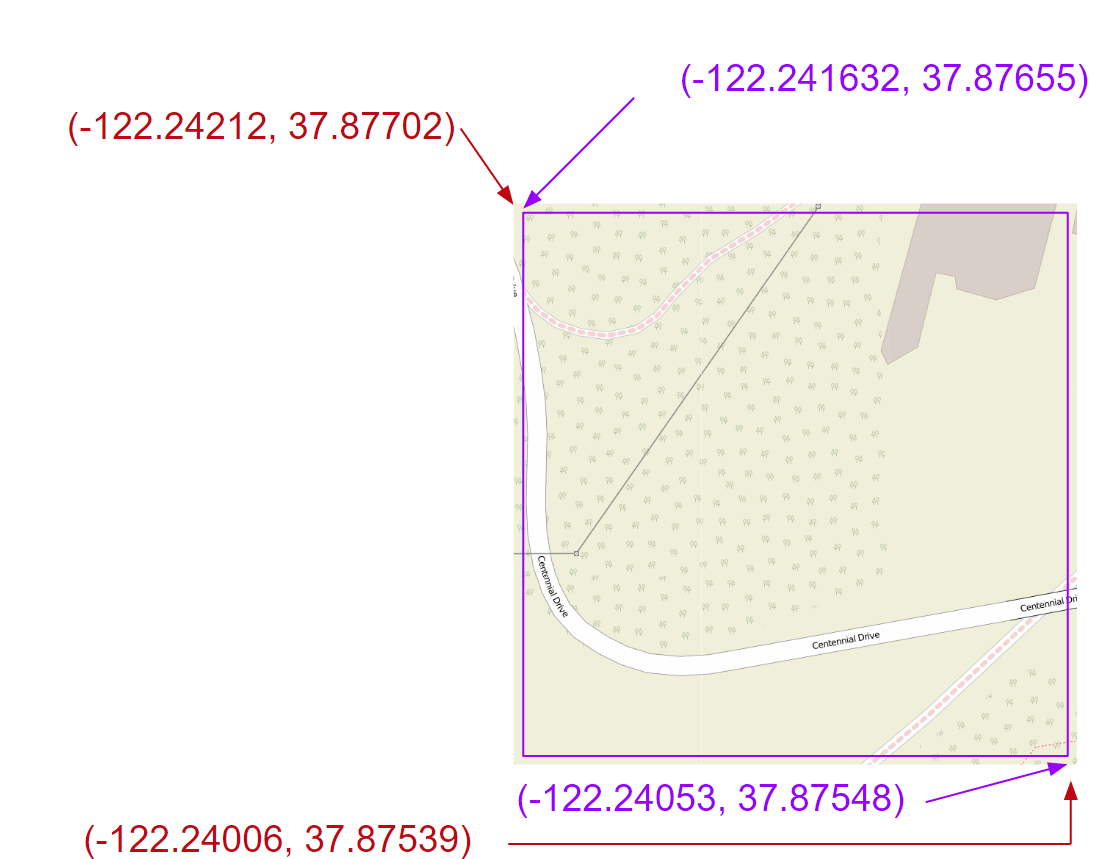
Which is the final image to return.
Let's consider the general case now. The query window shown below corresponds to the viewing window in the client. Although you are returning a full image, it will be translated (with parts off the window) appropriately by the client. In general the image you return should always be larger than (unless exactly equal to the tile data) the query window.
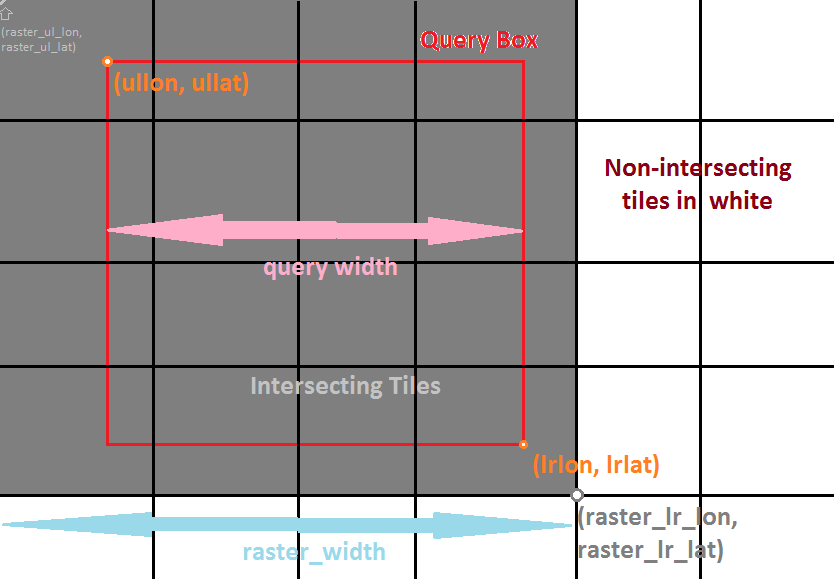
Given a query window from the client, you should perform an intersection query on the QuadTree. We have two requirements:
- The tile represented by the QuadTreeNode must have rectangle overlap with the query window. a. If it does not, we can ignore it.
- The tile represented must either satisfy the depth requirement, or be a leaf. a. If it does not, we must look deeper at it's children. If a node satisfies all of these requirements, we can collect it for drawing.
You will also need to arrange these tiles. Once all the tiles are collected, they should be arranged by their order in the plane - that is, they should be placed next to each other if their corner points intersect. For example, in the shown query above, we collect a set of 4x4 tiles; this corresponds to an image of size (4 x 256) x (4 x 256) pixels. The image you are returning should be of this size.
You may find the google search results for "combine png files java" useful as a reference on how to concatenate png files together into a BufferedImage. When getting started, you can just return an image and set query_success to true, and it will show up on the test pages; after setting the remaining return parameters, it should show up when running the server too.
You may end up with a combined image, for some queries, that ends up not filling the query box and that is okay - this arises when your latitude and longitude query do not intersect enough tiles to fit the query box. You can imagine this happening with a query very near the edge (in which case you just don't collect tiles that go off the edge); a query window that is very large, larger than the entire dataset itself; or a query window in lat and lon that is not proportional to its size in pixels. For example, if you are extremely zoomed in, you have no choice but to collect the leaf tiles and cannot traverse deeper.
After you've implemented this successfully, try moving around and zooming on the map - it should work.
Testing
We've included two test files, test1234.html and testTwelveImages.html. The file test1234.html provides input parameters that should yield 1.png, 2.png, 3.png, and 4.png. This is higher up in the quadtree, which should make it a little easier to debug compared to the old test.html.
The file testTwelveFiles.html provides input parameters that yield 12 files (described in the .html file itself). This is one level down in the quadtree and involves some amount of rectangle intersection checking, so should be your next step after testing with test1234.html.
These test some basic use cases that you can easily just open up and replicate. You can additionally modify the parameters in these files to suit your needs.
Runtime
Your constructor should take time linear in the number of tiles given.
You may not iterate through / explore all tiles to search for intersections. Suppose there are k tiles intersecting a query box, and n tiles total. Your entire query must run in O(k log k + log n) time (theoretically, on a tree of unbounded depth and size), including constructing the image. This can be broken up into two parts: O(log n) time to traverse the quadtree to where we begin collecting, and O(k log k) time to collect and arrange the intersected tiles. This should correspond to the standard quadtree traversal. It can be done faster than this, but remember that big-O is an upper bound.
Part 1 Submission
This marks the end of part 1 (project 2). There is still a FAQ at the bottom of this specification which you may find helpful.
Ensure you are passing all the tests locally before submitting.
You need only commit & push changes within the src folder. It should retain the structure given in the skeleton. DO NOT add or upload to git your img/ folder, or your osm or test files. Attempting to do so will eat your internet bandwidth and hang your computer, and will waste a submission.
Pushing any earlier than 4 days before the deadline will not trigger automatic build. You should run the tests manually on the web interface. Once automatic builds start, you will not have to.
Do not make your program have any maven dependencies other than the ones already provided. Doing so may fail the autograder.
Routing
This marks the beginning of part 2 (project 3). You need a working implementation of part 1 to receive full credit on part 2. Pull the skeleton code for proj3 (which contains a new test) from github and move your old proj 2 code into the proj3 directory.
Routing & Location Data
Routing and location data is provided to you in the berkeley.osm file. Download the file and place it in the root of your project directory. This is a subset of the full planet's routing and location data, pulled from here. The data is presented in the OSM XML file format.
XML is a markup language for encoding data in a document. Open up the berkeley.osm file for an example of how it looks. Each element looks like an HTML tag, but for the OSM XML format, the content enclosed is (optionally), more elements. Each element has attributes, which give information about that element, and sub-elements, which can give additional information and whose name tell you what kind of information is given.
Parse the XML file for the necessary routing and location data. You will find the Javadocs for GraphDB and MapDBHandler helpful, as well as the example code in MapDBHandler.java, which gives a basic parsing skeleton example. I have chosen to use a SAX parser; an "event-driven online algorithm for parsing XML documents". It works by iterating through the elements of the XML file. At the beginning and end of each element, it calls the startElement and endElement callbacks with the appropriate parameters.
Read through the OSM wiki documentation on the various relevant elements: the idea of a tag, the highway key, the way element, and the node element. You will need to use all of these elements, along with their attribute's values, to construct your graph for routing.
The node:
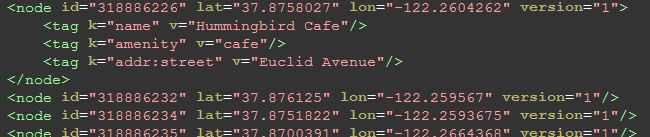
comprises the backbone of the map; the lat, lon, and id are required attributes of each node. They may be anything from locations to points on a road. If a node is a location, a tag element, with key "name" will tell you what location it is - above, we see an example.
The way:
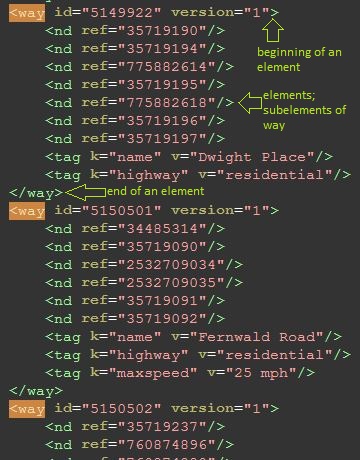
is a road or path and defines a list of nodes, with name nd and the attribute ref referring to the node id, all of which are connected in linear order. Tags in the way will tell you what kind of road it is - if it has a key of "highway", then the value corresponds to the road type. See the Javadoc on ALLOWED_HIGHWAY_TYPES for restrictions on which roads we care about. You can ignore all one-way tags and pretend all roads are two-way (impractical, but there are some inaccuracies in the OSM data).
This gives a natural construction of a graph. Make sure your graph does not have any disconnected nodes. Before removing any disconnected nodes, you should have 130462 nodes; after removal, you should have 28654.
Route Search
The /raster endpoint optionally receives four values for input: the start point's longitude and latitude, and the end point's longitude and latitude. Implement findAndDrawRoute, so that it satisfies the requirements in the Javadoc. You do not explicitly call findAndDrawRoute; it is called by the raster request handler if all the request parameters are present.
Your route should be the shortest path that starts from the closest connected node to the start point and ends at the closest connected node to the endpoint. Distance between two nodes is defined as the Euclidean distance between their two points (lon1, lat1) and (lon2, lat2). The length of a path is the sum of the distances between the ordered nodes on the path. With a call to /raster that includes routing parameters, lines of width ROUTE_STROKE_WIDTH_PX and of color ROUTE_STROKE_COLOR are drawn between all nodes onto the route in the rastered photo. Each connecting line should be drawn with the Stroke set to new BasicStroke(MapServer.ROUTE_STROKE_WIDTH_PX,BasicStroke.CAP_ROUND, BasicStroke.JOIN_ROUND). See the Java documentation on Graphics2D::setStroke. See the Java documentation on Graphics::drawLine. Recall that if you are using a BufferedImage, it has a getGraphics() method to get the Graphics object you can use to draw to that BufferedImage; this object has dynamic type Graphics2D (for setting the stroke).
If a line goes off the bounds of the BufferedImage, keep drawing and do not truncate it. Otherwise it will appear to end at the end of the image instead of continuing off of it. When computing the pixels to draw from and to (by converting from longitude and latitude), you should round down, either explicitly or by casting to int. This is an arbitrary choice.
Runtime & A*
Let d be the distance between the start and end node. You cannot explore all nodes within distance d from the start node. (for long paths, this could be more than half the nodes in the map).
While Dijkstra's algorithm for finding shortest paths works well, in practice if we can, we use A* search. Dijkstra's is a Uniform-Cost search algorithm - you visit all nodes at a distance d or less from the start node. However, in cases like this, where we know the direction that we should be searching in, we can employ that information as a heuristic.
Let n be some node on the search fringe (a min priority queue), s be the start node, and t be the destination node. A* differs from Dijkstra's in that it uses a heuristic h(n) for each node n that tells us how close it is to t. The priority associated with n should be f(n) = g(n) + h(n), where g(n) is the shortest known path distance from s and h(n) is the heuristic distance, the Euclidean distance from n to t, and thus the value of h(n) should shrink as n gets closer to t. This helps prevent Dijkstra from exploring too far in the wrong direction.
This amounts to only a small change in code from the Dijkstra's version (for me, one line): you simply need to specify a comparator for your priority queue that, instead of comparing on just the distance values, compares on the distance+heuristic value.
Supplemental Information
For an example of how this works, I recommend watching Professor Abbeel's video, where he goes over an example of A* on a general search space.
You can also watch his CS188 lecture on Informed Search, particularly starting from here, from back when I took CS188. Some of the ideas expressed are outside the scope of what you need for this project - you don't need to worry about the part where he starts explaining about optimality guarantees and heuristic admissibility if you don't want; in a graph embedded in the plane like the one we're working with, Euclidean distance is always admissible and consistent, and thus it guarantees optimality.
Autocompletion and Search
Locations
In the berkeley.osm file, we consider all nodes with a name tag a location. This name is not necessarily unique and may contain things like road intersections.
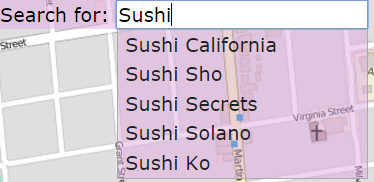
Autocomplete
The user may type a partial query string such as "Sushi". Implement getLocationsByPrefix, where the prefix is the partial query string. We will work with the cleaned name for search - everything except characters A through Z and spaces removed, and everything lowercased. Return a list of the full names of all locations whose cleaned names share the cleaned query string prefix, without duplicates.
I recommend using a Trie. You can traverse to the node that matches the prefix (if it exists) and then collect all valid words that are a descendant of that node.
Runtime
Suppose k words of maximum length share a prefix s. Then a query for s should take O(k) time. You can assume that the lengths of the names are bounded by some constant.
Search
Implement getLocations. Collect a List of Maps containing information about the matching locations - that is, locations whose cleaned name match the cleaned query string exactly. This is not a unique list and should contain duplicates if multiple locations share the same name (i.e. Top Dog, Bongo Burger). See the Javadoc for the information each Map should contain.
This will draw red dot markers on each of the matching locations. Note that because the location data is not very accurate, the markers may be a bit off (for example, the west side top dog is on the wrong side of the street) from their real location.
Runtime
Suppose there are k results. Your query should run in O(k).
Possible Extensions (optional)
There are some inefficiencies with the current design of this project that set it apart from conventional mapping applications like Google Maps.
Front-end Integration
Currently, you raster the entire image and then pass it to the front end for display, and re-raster every call. A better approach, and the one that popular rastering mapping applications nowadays take, would be to simply pass each tile's raster to the front end, and allow the front-end to assemble them on the page dynamically. This way, the front-end can make the requests for the image assets and cache them, vastly reducing repetitive work when drawing queries, especially if they use tiles that have already been drawn before.
Likewise, the front end could handle route drawing as all the back-end needs to pass to the front-end are the points along the route.
However, this poses a major problem to the project's design - it overly simplifies the amount of work you need to do and moves a large amount of the interesting work to the front-end, so for this small project you implement a simplified version.
Vectored Tiles
While for this project I've provided the mapping data in the form of images per tile, in reality these images are rastered from the underlying vector geometry - the roads, lines, filled areas, buildings and so on that make up the tile. These can all be drawn as triangles using a rendering API like OpenGL or WebGL; this speeds up the process even more, as much of the work is now passed on to the GPU which can handle this far more efficiently than the CPU. This data is all available from OpenStreetMap if you want to pursue this route of action. However, doing so is far beyond the scope of CS61B and more along the lines of CS184.
The Camera & The Quadtree
The real purpose of the quadtree is to enable multi-level, angled camera rendering (think about tilting the camera, or navigation mode in Google Maps). This idea of having a camera location, viewport, and viewing direction is a natural requirement of drawing vector geometry using OpenGL or similar APIs. However, camera tilt is a very difficult thing to get right and is far beyond the scope of Berkeley's undergrad CS curriculum.
Without that functionality, the Quadtree could be replaced with a different application structure, the slippy map, which is an exclusively top-down map like the one you've built in this project. This enforces a natural quad-tree structure but with fast conversion from level, longitude, and latitude to the tile co-ordinates as they exist in some level of the quadtree. This also disables the previous option I talked about, enabling vector geometry with a camera. However, a quadtree abstracts away a lot of the projection math that is outside the scope of this class.
The Front End
The front end is poorly written and doesn't look good. This is because I have no front-end experience or skills. Feel free to improve on it or destroy it and create your own, as we are not testing it at all.
Deploying to Heroku (optional)
Heroku is a service that will host your web application on AWS for free (and scale it up at a price). It's a cool option if you want to demo your project & and whatever upgrades you have made.
If you want to host your code online, below I will give a quick guide to how to get your application on Heroku, and is extensible to other services too. I choose to use Heroku because the process is the simplest; you could also host on other services like DigitalOcean, or host on your own server, AWS or Google Cloud directly.
Create a Heroku account, and using the web interface, create a new project with some name. Download the toolbelt and log in.
Add the following plugins to your pom.xml:
<plugin>
<artifactId>maven-assembly-plugin</artifactId>
<executions>
<execution>
<phase>package</phase>
<goals>
<goal>single</goal>
</goals>
</execution>
</executions>
<configuration>
<descriptorRefs>
<!-- This tells Maven to include all dependencies -->
<descriptorRef>jar-with-dependencies</descriptorRef>
</descriptorRefs>
<archive>
<manifest>
<addClasspath>true</addClasspath>
<mainClass>MapServer</mainClass>
</manifest>
</archive>
</configuration>
</plugin>
<plugin>
<groupId>com.heroku.sdk</groupId>
<artifactId>heroku-maven-plugin</artifactId>
<version>0.4.4</version>
<configuration>
<jdkVersion>1.8</jdkVersion>
<!-- Use your own application name -->
<appName>YOUR OWN APPLICATION NAME HERE</appName>
<processTypes>
<!-- Tell Heroku how to launch your application -->
<web>java -jar ./target/proj3-1.0-jar-with-dependencies.jar</web>
</processTypes>
<includeTarget>false</includeTarget>
<includes>
<include>target/proj3-1.0-jar-with-dependencies.jar</include>
</includes>
</configuration>
</plugin>under plugins. Replace YOUR OWN APPLICATION NAME HERE with the name of your application.
You will also have to assign the Heroku port:
port(getHerokuAssignedPort());
should go right below initialize() in main() and you can define that method like so:
private static int getHerokuAssignedPort() {
ProcessBuilder processBuilder = new ProcessBuilder();
if (processBuilder.environment().get("PORT") != null) {
return Integer.parseInt(processBuilder.environment().get("PORT"));
}
return 4567; //return default port if heroku-port isn't set (i.e. on localhost)
}In order to avoid the extra overhead of setting up multiple different server types (web, worker) and using a separate file server, we're going to package the entire deal into a single executable standalone jar, and tell Heroku to just run that. In order to do so, you will need to be able to find your files through the classLoader, which searches the CLASSPATH. Instead of loading up files, get your png and berkeley.osm files as resource streams:
In GraphDB, load berkeley.osm like this:
InputStream in = getClass().getClassLoader().getResourceAsStream(dbpath); sax.parse(in, maphandler);
and elsewhere, for example, when reading in images you can do something like this:
InputStream in = getClass().getClassLoader().getResourceAsStream(imgpath);
BufferedImage im = ImageIO.read(in);if getResourceAsStream returns null, then the resource does not exist on the classpath.
Move your img/ folder and berkeley.osm file to be on the classpath. For example, I put them in the static/ directory.
Delete your target/ folder. Depending on your intellij setup, this may be called out/ or something else. We will have maven build an executable jar with the dependencies included. Go Build -> Make Project.
Open up the maven projects sidebar (view -> tool windows -> maven). You will want to run the assembly:assembly task, followed by the heroku:deploy task.
If all goes well, you should be able to navigate to your heroku app site and see your results! Don't expect fantastic performance because you're on a free dyno, but it's a cool demo to show off nonetheless (or you could always run it locally for better responsiveness :P).
Note: These instructions have only been tested for me on my own Windows machine. Your mileage may vary.
FAQ
I wrote something to my output stream but it doesn't show up!
In order for something to show up, you need to set query_success to true, and in order for something to show up on map.html all the parameters must be set.
My initial map doesn't fill up the screen!
If your monitor resolution is high & the window is fullscreen, this can happen. Refer to the reference solution to see if it is okay. If you have a 1080p monitor, it will happen, and it is expected.
I don't fill up the query box on some inputs because I don't intersect enough tiles.
That's fine, and that happens when you would need a depth higher than what we can achieve in our quadtree.
Do I construct my quadtree in one pass or do I insert into it?
Construct it recursively in one pass. Inserting into it is much slower. You should not use some kind of method to list all the files in the directory.
How do I keep my Quadtree code simple when calculating rectangle intersections? This feels insane.
Rectangle intersection can be done with simple logic, but it takes some cleverness. See this stack overflow post for a simple example.
I'm getting funky behavior with moving the map around, my image isn't large enough at initial load, after the initial load, I can't move the map, or after the initial load, I start getting NaN as input params.
These all have to do with your returned parameters being incorrect. Make sure you're returning the exact parameters as given in the project 3 slides or the test html files.
I sometimes pass the timing tests when I submit, but not consistently.
If you have a efficient solution: it will always pass. I have yet to fail the timing test with either my solution or any of the other staff's solutions over a lot of attempts to check for timing volatility.
If you have a borderline-efficient solution: it will sometimes pass. That's just how it is, and there really isn't any way around this if we want the autograder to run in a reasonable amount of time.
I don't pass the route raster test, and I'm really close on the length of the array! Like, really, really close! And it looks okay! And my route is correct!
First, make sure you are following the spec precisely.
You may not be calculating the right pixels to draw the lines from and to correctly. Your math may be slightly off and could have loss of double precision somewhere. You may also have a bug somewhere before drawing the lines.
My project works fine on my computer, but inexplicably fails entirely on the autograder!
Make sure the way you're loading files is portable. That is - you should not be relying on OS-dependent ordering in listFiles() or hardcoding the full path to your img/ directory. These two are common mistakes.
Part 2 Submission
Ensure you are passing all the tests locally before submitting.
You need only commit & push changes within the src folder. It should retain the structure given in the skeleton. DO NOT add or upload to git your img/ folder, or your osm or test files. Attempting to do so will eat your internet bandwidth and hang your computer, and will waste a submission.
Pushing any earlier than 4 days before the deadline will not trigger automatic build. You should run the tests manually on the web interface. Once automatic builds start, you will not have to.
Do not make your program have any maven dependencies other than the ones already provided. Doing so may fail the autograder.
Acknowledgements
Data made available by OSM under the Open Database License. JavaSpark web framework and Google Gson library.