
FAQ #
Each assignment will have an FAQ linked at the top. You can also access it by adding “/faq” to the end of the URL. The FAQ for Lab 18 is located here.
Introduction #
Pull the skeleton, as usual. Copy the contents of Graph.java file from the
last lab into src/Graph.java.
More Graph Algorithms #
Last lab, we introduced graphs and their representations, and then we moved to basic graph iteration. A variety of algorithms for processing graphs are based on this kind of iteration, and we’ve already seen the following algorithms:
- Determining if a path exists between two different vertices
- Finding a path between two different vertices
- Topological sorting
None of these algorithms depended on the fringe representation. Either depth-first traversal (using a stack) or breadth-first traversal (using a queue) would have worked.
We’re now going to investigate an algorithm where the ordering of the fringe does matter. But first…
Storing Extra Information #
Recall the exercise from last lab where you determined the path from a start
vertex to a stop vertex. A solution to this exercise involved building a
traversal, and then filtering the vertices that were not on the path. Here was
the suggested procedure:
Then, trace back from the finish vertex to the start, by first finding a visited vertex
ufor which(u, finish)is an edge, then a vertexvvisited earlier thanufor which(v, u)is an edge, and so on, finally finding a vertexwfor which(start, w)is an edge (isAdjacentmay be useful here!). Collecting all these vertices in the correct sequence produces the desired path.
Instead of searching for the previous vertex along the path in all of the visited nodes like we did last lab, we can create predecessor links. If each fringe element contains a vertex and its predecessor along the traversed path, we can make the construction of the path more efficient. This is an example where it is useful to store extra information in the fringe along with a vertex.
Associating Distances with Edges #
In graph applications we’ve dealt with so far, edges were used only to connect vertices. A given pair of vertices were either connected by an edge or they were not. Other applications, however, process edges with weights, which are numeric values associated with each edge. Remember that in an application, an edge just represents some kind of relationship between two vertices, so the weight of the edge could represent something like the strength, weakness, or cost of that relationship.
In today’s exercises, the weight associated with an edge will represent the distance between the vertices connected by the edge. In other algorithms, a weight might represent the cost of traversing an edge or the time needed to process the edge.
A graph with edge weights is shown below.
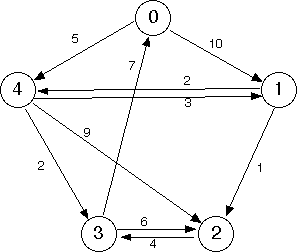
Observe the weights on the edges (the small numbers in the diagram), and note
that in a directed graph, the weight of an edge (v, w) doesn’t have to be equal to the weight of
the edge (w, v), its reverse.
Shortest Paths #
A common problem involving a graph with weighted edges is to find the shortest path between two vertices. This means to find the sequence of edges from one vertex to the other such that the sum of weights along the path is smallest. Note that though Breadth First Search might be able to find a path with the least number of edges, it’s not capable of finding a shortest path based off the total edge weight.
This is a core problem found in real life mapping applications. Say you want directions from one location to another. Your mapping software will try to find the shortest path from your location (a vertex), to another location (another vertex). Different paths in the graph may have different lengths and different amounts of traffic, which could be the weights of the paths. You would want your software to find the shortest, or fastest, path for you.
Discussion: Shortest Path #
For the graph pictured above, what is the shortest path that connects vertex 0 with vertex 2?
Click to reveal answer!
0 4 1 2For the graph pictured above, what is the shortest path that connects vertex 2 with vertex 1?
Click to reveal answer!
2 3 0 4 1For the graph pictured above, what is the shortest path that connects vertex 1 with vertex 0?
Click to reveal answer!
1 4 3 0Dijkstra’s Algorithm #
How did you do on the shortest path self-test? It’s pretty tricky, right?
Luckily, there is an algorithm devised by Edsger Dijkstra (usually referred to
as Dijkstra’s Algorithm), that can find the shortest paths on a graph, and
not just for a pair of vertices \((0, 2)\), but all the shortest paths from a
start vertex s to every other vertex reachable from s. The algorithm is
somewhat tedious for humans to do by hand, but it isn’t too inefficient for
computers.
Below is an overview of the algorithm. The algorithm below finds the
shortest paths from a starting vertex to all other nodes in a graph, also known
as a shortest paths tree. To just find the shortest path between two
specified vertices s and t, simply terminate the algorithm after t has
been visited.
We will use a priority queue for our fringe. Here, we’re using a min priority queue, because we want to prioritize visiting nodes with smaller total distance from the start point.
Initialization:
- Maintain a mapping, from vertices to their distance from the start vertex. This will be used by the fringe to determine the next vertex to visit. We will use a priority queue to implement this fringe. Here, an item’s priority is its distance from the start vertex.
- Add the start vertex to the fringe with distance/priority zero.
- All other nodes can be left out of the fringe. If a node is not in the fringe, assume it has distance infinity.
- For each vertex, keep track of which other node is the predecessor for the node along the shortest path found.
While Loop: Loop until the fringe is empty.
- Let
vbe the vertex in the fringe with the shortest distance to the start (or the highest priority). Remove and hold ontov.- Dijkstra’s visits vertices that are closest to the start first, thanks to our priority queue. Then if we have just popped
voff the queue, it must have been the next closest vertex from the start. This means that there is no possible shorter path to get tovthrough any vertices still on the queue, because they’re all farther from the start thanv! So whenever we visit a vertex, we know we’ve found the shortest possible path to that vertex. You can find more in depth proofs of this online.
- Dijkstra’s visits vertices that are closest to the start first, thanks to our priority queue. Then if we have just popped
-
If
vis the destination vertex, terminate now (this is optional and depends on whether you want to find a path to one goal or to all others). Otherwise, mark it as visited. Any visited vertices should not be visited again. -
Then, for each neighbor
wofv, do the following:-
As an optimization, if
whas been visited already, skip it (Dijkstra’s Algorithm visits vertices in distance-order from the root, so if we are revisiting a node, we have already found a a shorter path that gets us there). -
If
wis not in the fringe (or another way to think of it - it’s distance is infinity or undefined in our distance mapping), add it to the fringe (with the appropriate distance and previous pointers). -
Otherwise,
w’s distance might need updating if the path throughvtowis a shorter path than what we’ve seen so far. If that is indeed the case, replace the distance forw’s fringe entry with the distance fromstarttovplus the weight of the edge(v, w), and replace its predecessor withv. If you are using ajava.util.PriorityQueue, you will need to calladdorofferagain so that the priority updates correctly - do not callremoveas this takes linear time.
-
Every time a vertex is dequeued from the fringe, that vertex’s shortest path has
been found and it is finalized. The algorithm ends when the stop vertex is
returned by next. Follow the predecessors to reconstruct the path.
- We can’t guarantee the correctness of Dijkstra’s algorithm on graphs with negative edge weights*! Consider why this is the case. In CS 170, you’ll learn about the Bellman-Ford algorithm, which solves the same single-source shortest paths problem for graphs with negative edge weights too.
Dijkstra’s Algorithm Animation #
Dijkstra’s algorithm is pretty complicated to explain in text, so it might help you to see an animation of it.
As you watch the video, think about the following questions with your partner:
- In the animation you just watched, how can you tell what vertices were currently in the fringe for a given step?
- In the animation you just watched, after the algorithm has been run through, how can you look at the chart and figure out what the shortest path from \(A\) to \(H\) is?
Note that in this video, the fringe is initialized by putting all the vertices into it at the beginning with their distance set to infinity. While this is also a valid way to run Dijkstra’s algorithm for finding shortest paths (and one of the original ways it was defined), this is inefficient for large graphs. Semantically, it is the same to think of any vertex not in the fringe as having infinite distance, as a path to it has not yet been found.
Exercise: Dijkstra’s Algorithm #
With your partner, run Dijkstra’s algorithm by hand on the pictured graph below, finding the shortest path from vertex 0 to vertex 4. Keep track of what the fringe contains at every step.
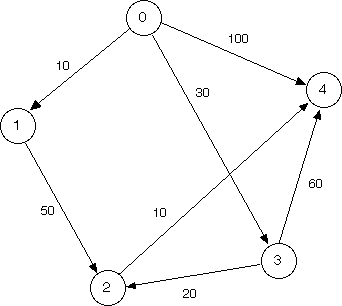
We recommend keeping track of a table like in the animation. Also, please make sure you know what the fringe contains at each step.
Answer below. Each of the entries is listed as “
Cilck to reveal answer!
| Iteration | 0 | 1 | 2 | 3 | 4 |
|---|---|---|---|---|---|
| 0 | 0 (0) | (-) | (-) | (-) | (-) |
| 1 | 0 (0)* | 10 (0) | (-) | 30 (0) | 100 (0) |
| 2 | 0 (0)* | 10 (0)* | 60 (1) | 30 (0) | 100 (0) |
| 3 | 0 (0)* | 10 (0)* | 50 (3) | 30 (0)* | 90 (3) |
| 4 | 0 (0)* | 10 (0)* | 50 (3)* | 30 (0)* | 60 (2) |
| 5 | 0 (0)* | 10 (0)* | 50 (3)* | 30 (0)* | 60 (2)* |
Exercise: shortestPath #
Add Dijkstra’s algorithm to Graph.java from yesterday. Here’s the method
header:
public List<Integer> shortestPath(int start, int stop) {
// TODO: YOUR CODE HERE
return null;
}
For this method, you will need to refer to each Edge object’s weight field.
Additionally, it may be useful to write a getEdge method, that will return the
Edge object corresponding to the input variables. Here’s the header:
public Edge getEdge(int u, int v) {
// TODO: YOUR CODE HERE
return null;
}
Hint: At a certain point in Dijkstra’s algorithm, you have to change the value
of nodes in the fringe. Java’s PriorityQueue does not support this operation
directly, but we can add a new entry into the PriorityQueue that contains the
updated value (and will always be dequeued before any previous entries). Then,
by tracking which nodes have been visited already, you can simply ignore any
copies after the first copy dequeued.
Additionally, adding the vertices to our PriorityQueue fringe directly won’t
be enough. Our vertices are integers, so the PriorityQueue will order them by
their natural ordering. Write a comparator to change the ordering of the
vertices.
Runtime #
Implemented properly using a priority queue backed by a binary heap, Dijkstra’s
algorithm should run in O((|V| + |E|) log |V|) time. This is because at all
times our heap size remains a polynomial factor of |V| (even with lazy
removal, our heap size never exceeds |V|^2), and we make at most |V|
dequeues and |E| updates requiring heap operations.
For connected graphs, the runtime can be simplified to O(|E| log |V|), as the
number of edges must be at least |V| - 1. Using alternative implementations of
the priority queue can lead to increased or decreased runtimes.
A* search #
Sometimes, we know more about a graph than just the edge weights. If we’re looking for the shortest path from s to t, we might have an estimate of how far any other vertex is to t. For example, imagine you’re in Berkeley, and you want to know the shortest path to Daly City. The two nearest vertices to Berkeley are San Francsico and Oakland. Oakland is a little closer to your starting point, but you can estimate that San Francisco is ultimately closer to the goal. If we were using Dijkstra’s right now, we’d still go to Oakland first, since Dijkstra’s only considers how close something is to the start. With A* though, we can take into account our estimate, and go to San Francisco first!
This estimate is found by using a heuristic. In A*, our heuristic function is some way to calculate an approximate distance of any given vertex to a goal.
A* runs extremely similar to Dijkstra’s. The primary difference is that for a vertex v, its priority in the priority queue is the sum of the known distance from s to v, and the estimated distance from v to the goal, t. By doing so, each node is prioritized by what we believe the total path will be if we go through that node. This makes sense when considering that the path lengths should add up: dist(s, v) + dist(v, t) = dist(s, t).
So by looking at the priority queue this way, we are first looking at paths we think will have the lowest total distance, not just the lowest distance so far. However, if our heuristic is completely misguided, then our judgements will be wrong. We say that an A* is only guaranteed to find the correct shortest path if the heuristic is admissive and consistent.
- Admissive means that the heuristic never OVERestimates the real distance to the goal. Consider that if our heuristic was not admissive, we might be deterred from visiting a vertex that was actually involved in the correct shortest path.
- Consistent means the the heuristic never has huge logical gaps between any neighboring vertices. Consider if I told you Berkeley was an estimated 500 miles from Daly City, and San Francisco was an estimated 5 miles away from Daly City. Similarly to how we know edge weights in a graph, we also know that the distance from Berkeley to San Francisco is 13 miles. But then our estimations for the distances to Daly City make no sense, and are completely inconsistent!
You’ll learn more about A* in theoretical lab!
Optional Applications #
Graphs have very real applications! For example, some approaches to BYOW that we’ve seen in the past have used graph algorithms. We can also use graphs to solve other problems in computer science such as:
- Garbage Collection, the problem of managing memory in Java.
- Search engines utilize algorithms (most famously, Google’s PageRank) to sovle the problem of organizing information on the internet and making efficient queries on the data to return the best results.
Deliverables #
- Complete the
shortestPathmethod inGraph.java.