Introduction
This project was originally created by former TA and CS 61BL instructor Alan Yao (now at AirBNB). It is a web mapping application inspired by Alan’s time on the Google Maps team and the OpenStreetMap project, from which the tile images and map feature data was downloaded.
In this project, you’ll build the “smart” pieces of a web-browser based Google Maps clone. You’ve actually already done or will do much of this work in the labs (lab 14: Heaps and Priority Queues, lab 17: Graph Algorithms, and lab 18: \(k\)-d Trees and Tries).
Unlike prior 61BL projects, you’ll start with a gigantic code base that somebody else wrote. This is typical in real world programming, where you don’t have the luxury and freedom that comes with starting from totally blank files. As a result, you’ll need to spend some time getting to know the provided code, so that you can complete the parts that need completing.
By the end of this project, with some extra work, you can even host your application as a publicly available web app! More details will be provided at the end of this spec.
The project 2C video playlist from the Spring 2019 offering of CS 61B starts with an introductory video that should help you get started. Though this project has been augmented since it was done in the Spring, the video and slides are still quite relevant. The slides that will be used in the project 2C video playlist are available here.
There is a reference version of the project solution running at http://bearmaps3.herokuapp.com/map.html. It will probably be quite slow given that lots of people will be using it.
Setup
There is a lot of setup for this project, so take it slowly!
Partner Repository
Partnerships are required for this project. Please see the Collaboration Guide for more information. If you still need to find a partner, please contact your lab TA as soon as possible.
For this project, you should choose a partner to work with, and you should be working collaboratively in your shared repository, which should have a name of the form su19-proj3-g*** (this is different from previous projects; the g stands for group!). If you haven’t set this up yet, please see the instructions in Lab 9 to do so (replacing all instances of su19-proj2-s***-s*** with su19-proj3-g***).
If you find yourself faced with a strange text editor or a merge conflict, see the Git Weird Technical Failures guide for how to proceed.
Once you’ve successfully merged, you should see a proj3 directory appear with files that match the skeleton repository.
If you get some sort of error, STOP and either figure it out by carefully reading the git guide or seek help in lab or on Piazza. You’ll potentially save yourself a lot of trouble vs. guess-and-check with git commands. If you find yourself trying to use commands recommended by Google like force push, don’t. Don’t use force push, even if a post you found on Stack Overflow says to do it!
Libraries
Once you’ve gotten your proj3 directory, cd into the library-su19 directory and do the following commands (this will take a long time because there are 20,000+ files to download):
git submodule update --init
After doing this, check that the following are true:
- You should have the
javalibanddatafolders inlibrary-su19(as you saw in your previous repos). - There should be
library-su19/data/proj3_imgs,library-su19/data/proj3_xml, andlibrary-su19/data/proj3_test_inputsfolders. - There should be a
library-su19/javalib/proj3folder, in addition to the other libraries.
IntelliJ Setup
Importing the Project and Libraries
Start by importing the project as usual (using either File->New->Project From Existing Sources or “Import Project From Existing Sources” on the front panel).
Next, we’ll need to import all the libraries that are in the javalib folder, including the proj3 directory. If you do not remember how to do this, do the following steps.
To do this, click “File->Project Structure”, then click “Libraries” on the screen that pops up. You should see something like what is shown in the figure below.
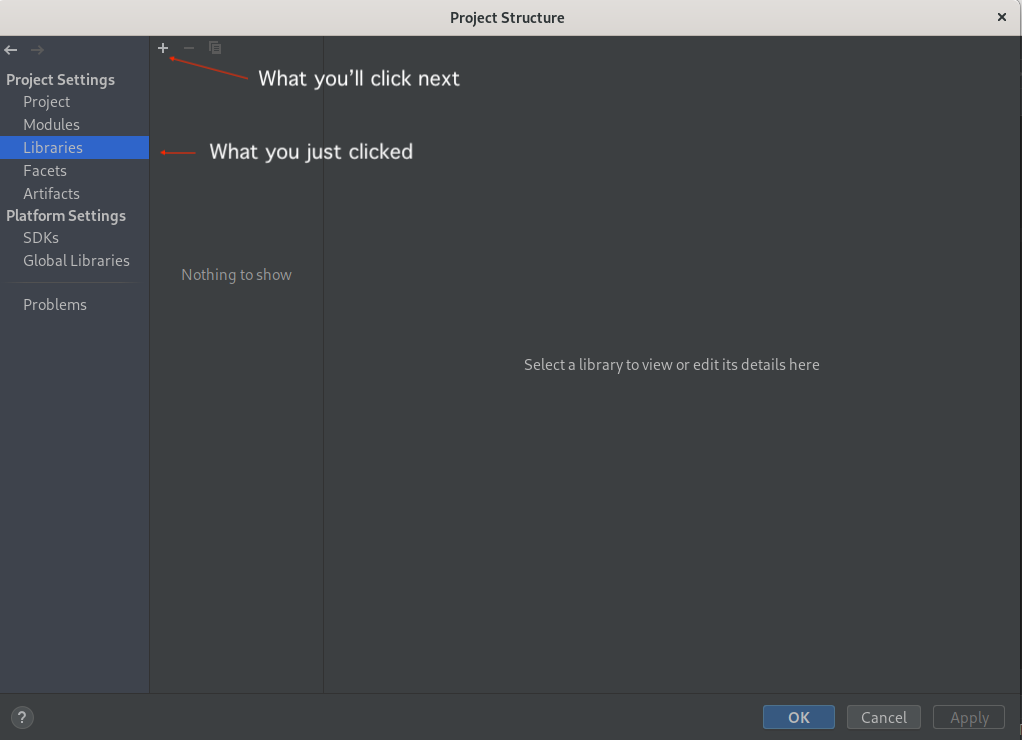
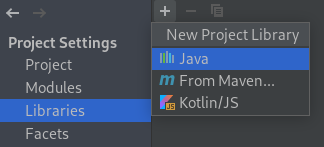
The next step is to click the plus sign at the top of the screen, then click “Java” from the list of options.
Navigate to the library-su19 folder and click all the files in that folder.
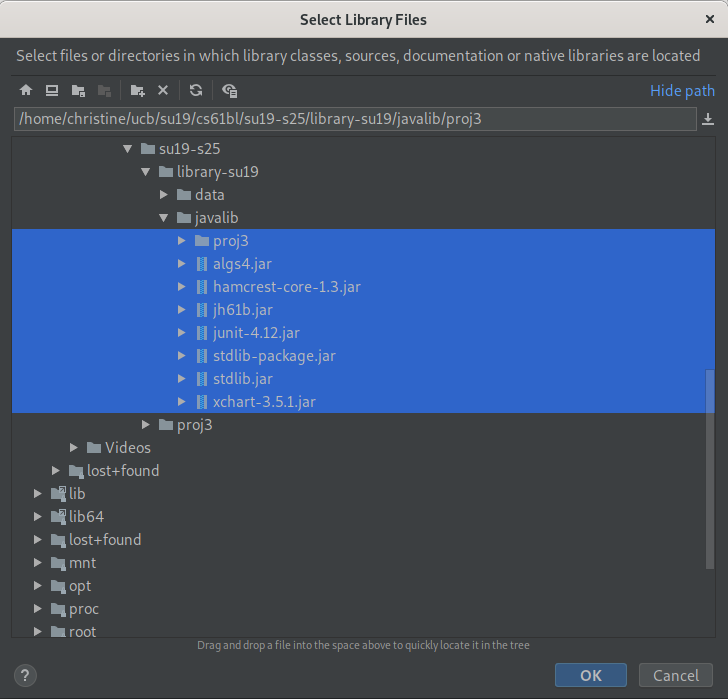
Click “OK” and a message should pop up saying “Library ‘proj3’ will be added to the selected modules: proj3”.
Click “OK” again. Then click “OK” one more time.
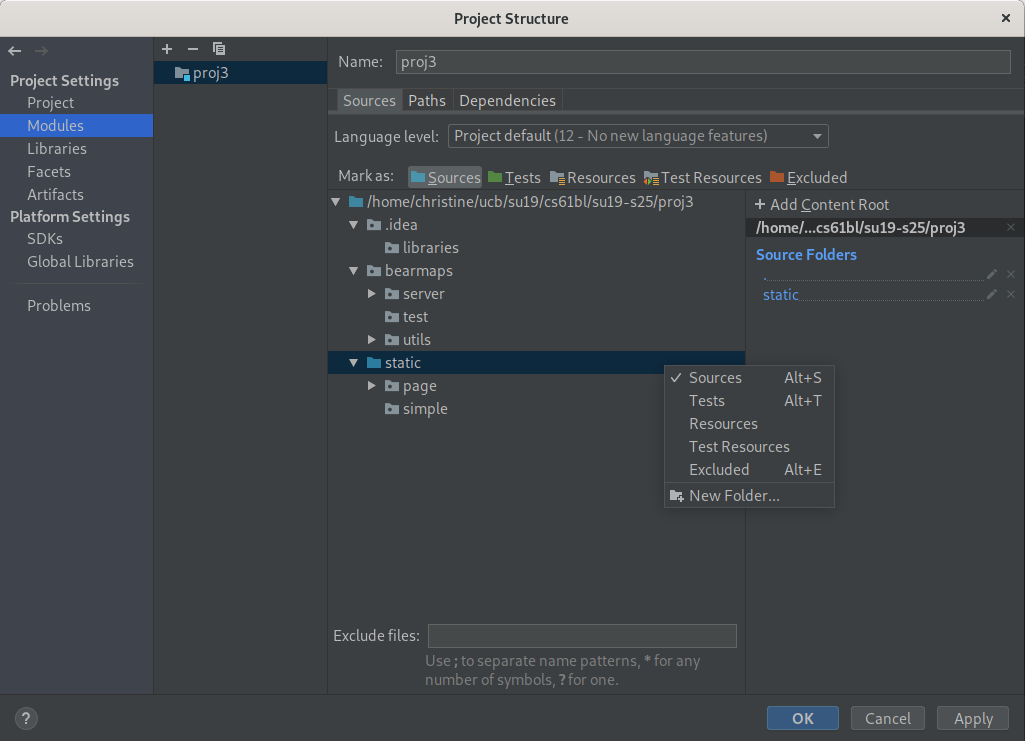
Marking the Static Directory
Go to Project Structure -> Modules -> proj3. Right-click the static folder and select Sources
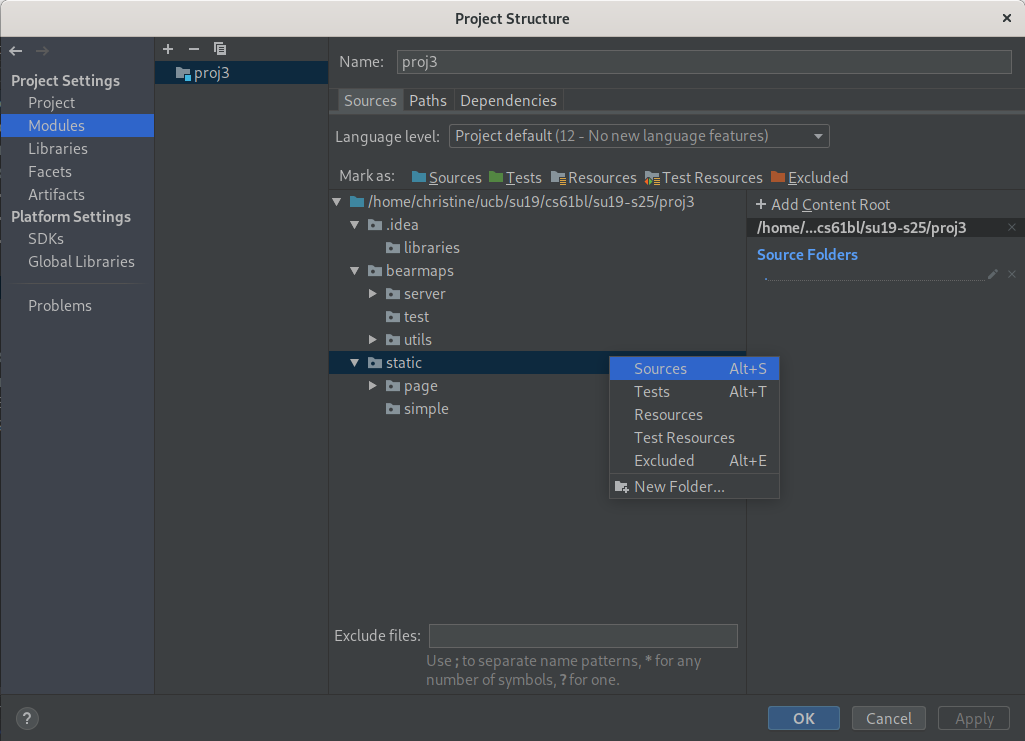
The static folder should now be highlighted in blue.
Setting the Language Level
Depending on your version of IntelliJ you may need need to do this step, but it doesn’t hurt to do so anyway.
Again, do “File->Project Structure”. Then click “Project”, which is just a bit above the “Libraries” button. Then under “Project Language Level”, make sure that level 12 is selected.
Verifying Project 3 Setup
To finally verify that everything is working correctly, open the java file called MapServer.java and run its main method.
It should start running, and in the console, you should see something similar to the following:
[Thread-0] INFO org.eclipse.jetty.util.log - Logging initialized @1869ms to org.eclipse.jetty.util.log.Slf4jLog
[Thread-0] WARN org.eclipse.jetty.server.AbstractConnector - Ignoring deprecated socket close linger time
[Thread-0] INFO spark.webserver.JettySparkServer - == Spark has ignited ...
[Thread-0] INFO spark.webserver.JettySparkServer - >> Listening on 0.0.0.0:4567
[Thread-0] INFO org.eclipse.jetty.server.Server - jetty-9.4.15.v20190215; built: 2019-02-15T16:53:49.381Z; git: eb70b240169fcf1abbd86af36482d1c49826fa0b; jvm 11.0.2+9-LTS
[Thread-0] INFO org.eclipse.jetty.server.session - DefaultSessionIdManager workerName=node0
[Thread-0] INFO org.eclipse.jetty.server.session - No SessionScavenger set, using defaults
[Thread-0] INFO org.eclipse.jetty.server.session - node0 Scavenging every 660000ms
[Thread-0] INFO org.eclipse.jetty.server.AbstractConnector - Started ServerConnector@3405d917{HTTP/1.1,[http/1.1]}{0.0.0.0:4567}
[Thread-0] INFO org.eclipse.jetty.server.Server - Started @2235ms
Note: If you’re using Windows, a pop-up might appear saying “Windows Defender Firewall has blocked some features of this app.”. If this happens, you should allow access (though it should work fine even if you don’t).
What’s happening here is that your computer is now acting as a web server, with your Java code ready to respond to web requests. Let’s see it in action.
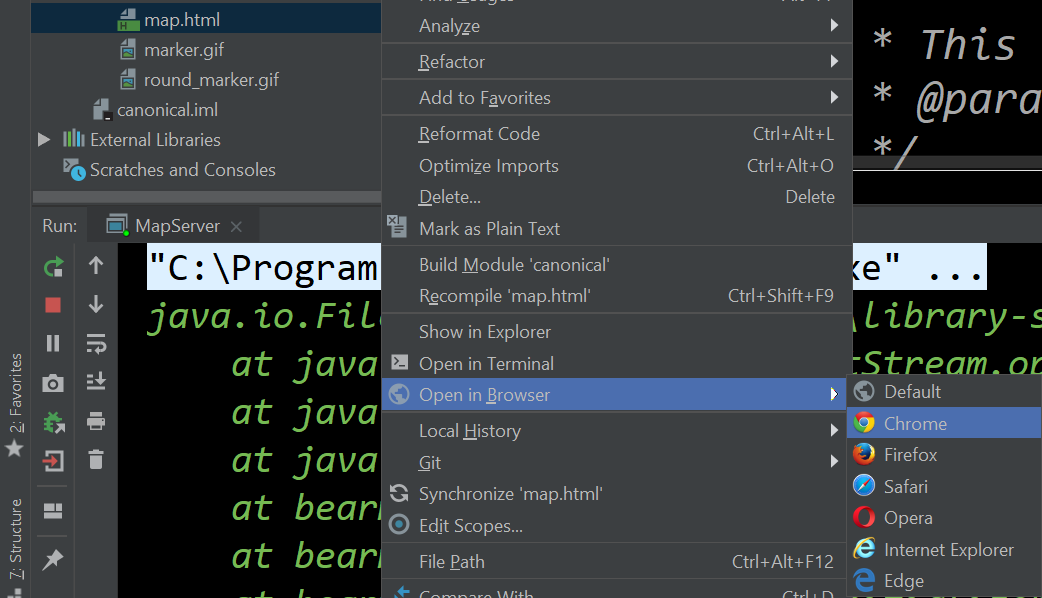
Go to the file navigation panel on the left side of IntelliJ and look for static.page towards the bottom of your project directory. Expand it, and you should see map.html. Right click on this file, then go to “Open in Browser”, similar to shown below. We recommend Chrome.
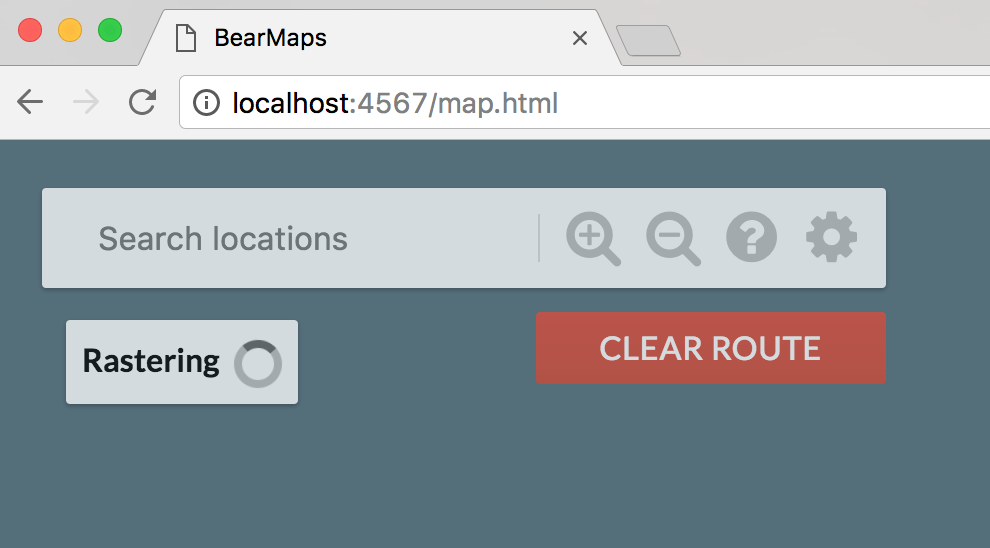
Once you’ve opened map.html, you should see something like the window below, where the front end makes a back end to provide image data. Since you haven’t implemented the back end, this data will never arrive.
You’ll also notice that in the console, opening up map.html in the web browser did something. Specifically you should see the message below.
Since you haven't implemented RasterAPIHandler.processRequest, nothing is displayed in your browser.
Your rastering result is missing the render_grid field.
Let’s try one more thing! Go to the processRequest method of the RasterAPIHandler method of the bearmaps.server.handler.impl package and you’ll see the following print statements. Try uncommenting the two print statements in the file (replicated below):
System.out.println("yo, wanna know the parameters given by the web browser? They are:");
System.out.println(requestParams);
Stop (using the red stop button in IntelliJ, or using the method of your choice) the MapServer program and restart it. Then refresh the page in your web browser and you should see this printed in IntelliJ:
yo, wanna know the parameters given by the web browser? They are:
{lrlon=-122.19016181945801, ullon=-122.27625, w=2006.0, h=1008.0, ullat=37.88, lrlat=37.84584557684252}
Since you haven't implemented RasterAPIHandler.processRequest, nothing is displayed in your browser.
Your rastering result is missing the render_grid field.
Pretty cool! Your web browser is trying to communicate with your Java program! In this project, you’ll be modifying your Java code so that it is able to talk to the browser and display mapping data.
Phew! That’s all the setup we need. Now we can get started on the project itself.
Note: Absolutely make sure to end your instance of MapServer before re-running or starting another up. Not doing so will cause a java.net.BindException: Address already in use. If you end up getting into a situation where you computer insists the address is already in use, either figure out how to kill all Java processes running on your machine (using Stack Overflow or similar) or reboot your computer.
Overview
Application Structure
Your job for this project is to implement the back end of a web server. To use your program, a user will open an html file in their web browser that displays a map of the city of Berkeley, and the interface will support scrolling, zooming, and route finding (similar to Google Maps). We’ve provided all of the “front end” code. Your code will be the “back end” which does all the hard work of figuring out what data to display in the web browser.
At its heart, the project works like this: The user’s web browser provides a URL to your Java program, and your Java program will take this URL and generate the appropriate output, which will displayed in the browser. For example, suppose your program were running at bloopblorpmaps.com, the URL might be:
bloopblorpmaps.com/raster&ullat=37.89&ullon=-122.29&lrlat=37.83&lrlon=-122.22&w=700&h=300
The job of the back end server (i.e. your code) is take this URL and generate an image corresponding to a map of the region specified inside the URL (more on how regions are specified later). This image will be passed back to the front end for display in the web browser.
You’ll notice the web address that we saw in the setup instructions is strange, starting with localhost:63365 or similar instead of something like www.eecs.berkeley.edu. localhost means that the website is on your own computer, and the “63365” refers to a port number, something that you’ll learn about in a future class.
We will be providing the front end (in the form of .html and Javascript files which you will not need to open or modify), but we’ll also provide a great deal of starter code (in the form of .java files) for the back end. This starter code will handle all URL parsing and communication for the front end. This code uses Java Spark as the server framework. You don’t need to worry about the internals of this, since our code handles all the messy translation between web browser and your Java programs.
If you do go exploring, you’ll notice that the structure of the skeleton code for this project is significantly more complex than anything you’ve probably seen in a class. This is because we’ve built something that more closely resembles what you might see in a real world project, with tons of different packages interesting in various ways. You’re not required to understand all of this in order to complete the project, though you’re welcome to explore. The next section of this spec will explain what pieces you absolutely have to look at.
Parts of this Project
There are 5 parts of this project. The first two are required, the third is extra credit, and the last two are completely optional. The parts are as follows:
- Part I, Map Rastering: Given coordinates of a rectangular region of the world and the size of the web browser window, provide images of the appropriate resolution that cover that region.
- Part II, Routing: Given a start and destination latitude and longitude, provide street directions between those points.
- Part III, Autocomplete: Given a string, find all locations that match that string. Useful for finding, e.g. all the Top Dogs in Berkeley.
- Part IV, Written Directions: Augment the routing from Part II to include written driving directions.
- Part V, Above and Beyond: Do anything else that seems fun.
I. Map Rastering (Required)
Rastering is the job of converting information into a pixel-by-pixel image. In the RasterAPIHandler class you will take a user’s desired viewing rectangle and generate an image for them.
The user’s desired input will be provided to you as a Map<String, Double> params, and the main goal of your rastering code will be to create a String[][] that represents the files that should be displayed in response to this query.
As a specific example (given as “testTwelveImages.html” in the skeleton files), the user might specify that they want the following information:
{lrlon=-122.2104604264636, ullon=-122.30410170759153, w=1085.0, h=566.0, ullat=37.870213571328854, lrlat=37.8318576119893}
This means that the user wants the area of earth delineated by the rectangle between longitudes -122.2104604264636 and -122.30410170759153 and latitudes 37.870213571328854 and 37.8318576119893. They also would like this area displayed in a window roughly 1085 x 566 pixels in size (width x height). We call the user’s desired display location on earth the query box.
To display the requested information, you will need street map pictures, which is provided in library-su19. All of the images provided are 256 x 256 pixels. Each image is at various levels of zoom. For example, the file d0_x0_y0.png is the entire map, and covers the entire region. The files d1_x0_y0.png, d1_x0_y1.png, d1_x1_y0.png, and d1_x1_y1.png are also the entire map, but at double the resolution, i.e. d1_x0_y0 is the northwest corner of the map, d1_x1_y0 is the northeast corner, d1_x0_y1 is the southwest corner, and d1_x1_y1 is the southeast corner.
More generally, at the \(D\)-th level of zoom, there are \(4^D\) images, with names ranging from dD_x0_y0 to dD_xk_yk, where \(k\) is \(2^D - 1\). As \(x\) increases from \(0\) to \(k\), we move eastwards, and as \(y\) increases from \(0\) to \(k\), we move southwards. Keep both of these points this in mind, as this will be useful when you write your rastering code!
The job of your rasterer class is decide, given a user’s query, which files to serve up. For the example above, your code should return the following 2D array of strings:
[[d2_x0_y1.png, d2_x1_y1.png, d2_x2_y1.png, d2_x3_y1.png],
[d2_x0_y2.png, d2_x1_y2.png, d2_x2_y2.png, d2_x3_y2.png],
[d2_x0_y3.png, d2_x1_y3.png, d2_x2_y3.png, d2_x3_y3.png]]
This means that the browser should display d2_x0_y1.png in the top left, then d2_x1_y1.png to the right of d2_x0_y1.png, and so forth. Thus our “rastered” image is actually a combination of 12 images arranged in 3 rows of 4 images each. Our code will then take your 2D array of strings and display the appropriate image in the browser. If you’re curious how this works, see writeImagesToOutputStream in RasterAPIHandler.
Since each image is 256 x 256 pixels, the overall “rastered” image given above will be 1024 x 768 pixels.
However, there are many combinations of images that cover the query box. For example, we could instead use higher resolution images of the exact same areas of Berkeley. For example, instead of using d2_x0_y1.png, we could have used d3_x0_y2.png, d3_x1_y2.png, d3_x0_y3.png, d3_x1_y3.png while also substituting d2_x1_y1.png by d3_x2_y2.png, d3_x3_y2.png, etc. The result would be total of 48 images arranged in 6 rows of 8 images each (make sure this makes sense!) and would result in a 2048 x 1536 pixel image.
It might be tempting to say that a 2048 x 1536 image is more appropriate than 1024 x 768. After all, the user requested 1085 x 556 pixels and 1024 x 768 is too small to cover the request in the width direction. However, pixel counts are not the way that we decide which images to use.
Instead, to rigorously determine which images to use, we will define the longitudinal distance per pixel (LonDPP) as follows. Given a query box or image, the LonDPP of that box or image is
\[\text{LonDPP} = \frac{\text{lower right longitude} - \text{upper left longitude}}{\text{width of the image (or box) in pixels}}\]For example, for the query box in the example in this section, the LonDPP is (-122.2104604264636 + 122.30410170759153) / (1085) or 0.00008630532 units of longitude per pixel. At Berkeley’s latitude, this is very roughly 25 feet of distance per pixel.
Note that the longitudinal (horizontal) distance per pixel is not the same as the latitudinal (vertical) distance per pixel. This is because the earth is curved. If you use latDPP, you will have incorrect results.
The images that you return in your String[][] when rastering must be those that:
- Represent any region of the query box.
- Have the greatest LonDPP that is less than or equal to the LonDPP of the query box (as zoomed out as possible). If the requested LonDPP is less than what is available in the data files, you should use the lowest LonDPP available instead (i.e. depth 7 images).
For image depth 1 (e.g. d1_x0_y0), every tile has LonDPP equal to 0.000171661376953125 (for an explanation of why, see the next section) which is greater than the LonDPP of the query box, and is thus unusable. This makes intuitive sense as well: if the user wants an image which covers roughly 25 feet per pixel, we shouldn’t use an image that covers ~50 feet per pixel because the resolution is too poor. For image depth 2 (e.g. d2_x0_y1), the LonDPP is 0.0000858306884765625, which is better (i.e. smaller) than the user requested, so this is fine to use. For depth 3 tiles (e.g. d3_x0_y2.png), the LonDPP is 0.00004291534423828125. This is also smaller than the desired LonDPP, but using it is overkill since depth 2 tiles (e.g. d2_x0_y1) are already good enough. Think of LonDPP as “blurriness”, i.e. the d0 image is the blurriest (most zoomed out/highest LonDPP), and the d7 images are the sharpest (most zoomed in, lowest LonDPP).
As an example of an intersection query, consider the image below, which summarizes key parameter names and concepts. In this example search, the query box intersects 9 of the 16 tiles at depth 2.
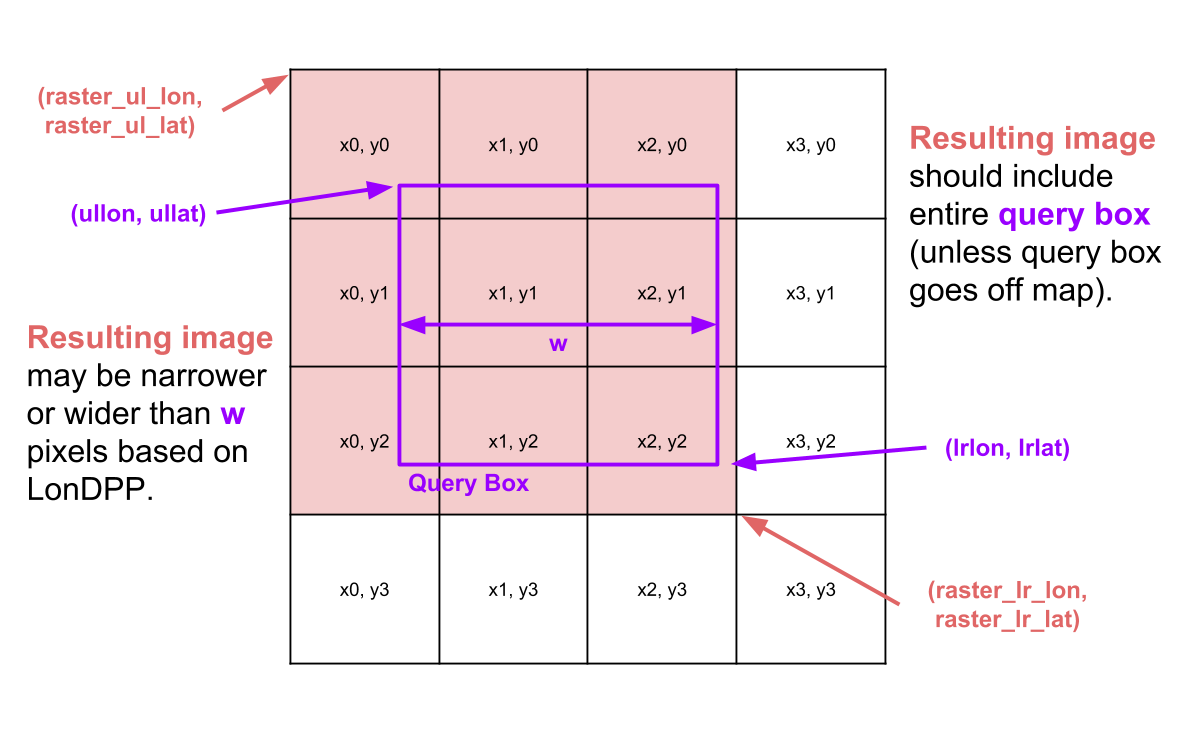
For an interactive demo of how the provided images are arranged, see this FileDisplayDemo. Try typing in a filename (.png extension is optional), and it will show what region of the map this file corresponds to, as well as the exact coordinates of its corners, in addition to the LonDPP in both longitude units per pixel and feet per pixel.
Note: We do not take into account the curvature of the earth for rastering. The effect is too small to matter. That is, we assume the LonDPP is the same for all values of y. In an industrial strength mapping application, we would need to keep in mind that the LonDPP per tile varies as we move with respect to the equator.
One natural question is, why not use the best quality images available all the time (i.e. smallest LonDPP, e.g. depth 7 images like d7_x0_y0.png)? The answer is that the front end doesn’t do any rescaling, so if we used ultra low LonDPPs for all queries, we’d end up with absolutely gigantic images displayed in our web browser.
Image File Layout and “Bounding Boxes”
There are four constants that define the coordinates of the world map, all given in the bearmaps.utils.Constants.java class. The first is ROOT_ULLAT, which tells us the latitude of the upper left corner of the map. The second is ROOT_ULLON, which tells us the longitude of the upper left corner of the map. Similarly, ROOT_LRLAT and ROOT_LRLON give the latitude and longitude of the lower right corner of the map. All of the coordinates covered by a given tile are called the “bounding box” of that tile. So for example, the single depth 0 image d0_x0_y0 covers the coordinates given by ROOT_ULLAT, ROOT_ULLON, ROOT_LRLAT, and ROOT_LRLON.
Recommended exercise: Try opening d0_x0_y0.png. Then try using Google Maps to show the point given by ROOT_ULLAT, ROOT_ULLON. You should see that this point is the same as the top left corner of d0_x0_y0.png.
Another important constant in bearmaps.utils.Constants.java is TILE_SIZE. This is important because we need this to compute the LonDPP of an image file. For the depth 0 tile, the LonDPP is just (ROOT_LRLON - ROOT_ULLON)/TILE_SIZE, i.e. the number of units of longitude divided by the number of pixels.
All levels in the image library cover the exact same area. So for example, d1_x0_y0.png, d1_x1_y0.png, d1_x0_y1.png, and d1_x1_y1.png comprise the northwest, northeast, southwest, and southeast corners of the entire world map with coordinates given by the ROOT_ULLAT, ROOT_ULLON, ROOT_LRLAT, and ROOT_LRLON parameters.
The bounding box given by an image can be mathematically computed using the information above. For example, suppose we want to know the region of the world that d1_x1_y1.png covers. We take advantage of the fact that we know that d0_x0_y0.png covers the region between longitudes -122.29980468 and -122.21191406 and between latitudes 37.82280243 and 37.89219554. Since d1_x1_y1.png is just the southeastern quarter of this region, we know that it covers half the longitudinal and half the latitudinal distance as d0_x0_y0.png, specifically the region between longitudes -122.25585937 and -122.21191406 and between latitudes 37.82280243 and 37.85749898.
Similarly, we can compute the LonDPP in a similar way. Since d1_x1_y1.png is 256 x 256 pixels (as are all image tiles), the LonDPP is the difference of the longitudes of d1_x1_y1.png divided by TILE_SIZE ((-122.21191406 - -122.25585937)/256 or 0.00017166).
If you’ve fully digested the information described in the spec so far, you now know enough to figure out which files to provide given a particular query box. See the project 2C slides and video at the top of the spec for more hints if you’re stuck.
Note: If someone is helping you who took 61B in Spring 2017 or earlier, they might suggest using a Quadtree, which was the previously recommended way of solving the tile identification problem. You’re welcome to attempt this approach, but the project has changed enough that Quadtrees are no longer necessary nor desirable as a solution.
Map Rastering (API)
In Java, you will implement the RasterAPIHandler by filling in a single method:
public Map<String, Object> processRequest(Map<String, Double> requestParams, Response response)
The given requestParams are described in the skeleton code. An example is provided in the “Map Rastering (Overview)” section above, and you can always try opening up one of our provided html files and simply printing out requestParams when this method is called to see what you’re given.
Your code should return a Map<String, Object> as described in the Javadocs (the /** */ comments in the skeleton code). We do this as a way to hack around the fact that Java methods can only return one value. This map includes not just the two dimensional array of Strings, but also a variety of other useful information that will be used by your web browser to display the image nicely (e.g. raster_lr_lon and raster_ul_lat). See the comments in the source code for more details. We will not explain these in the spec.
Corner Cases
Corner Case 1: Partial Coverage
For some queries, it may not be possible to find images to cover the entire query box. This is OK. This can happen in two ways:
- If the user goes to the edge of the map beyond where data is available.
- If the query box is so zoomed out that it includes the entire dataset.
In these cases, you should return what data you do have available.
Corner Case 2: No Coverage
You can also imagine that the user might provide query box for a location that is completely outside of the root longitude/latitudes. In this case, there is nothing to raster, raster_ul_lon, raster_ul_lat, etc. are arbitrary, and you should set query_success: false. If the server receives a query box that doesn’t make any sense, eg. ullon, ullat is located to the right of lrlon, lrlat, you should also ensure query_success is set to false.
Runtime
You may not iterate through / explore all tiles to search for intersections with the query box. Suppose there are \(k\) tiles intersecting a query box, and \(N\) tiles total. Your entire query should run in \(O(k)\) time. Your algorithm should not run in \(\Theta(N)\) time. This is not for performance reasons, since \(N\) is going to be pretty small in the real world (less than tens of thousands), but rather because the \(\Theta(N)\) algorithm is inelegant.
The autograder is not smart enough to tell the difference, so if you really insist, you can do the \(\Theta(N)\) algorithm. But we encourage you to try to figure out something better.
Warning
It is likely that you will get latitude and longitude or \(x\) and \(y\) mixed up at least once or mix up which way is up versus down for y. Remember that longitude corresponds to \(x\) and latitude corresponds to \(y\). Moving from west to east (left to right) increases \(x\) and moving from south to north (bottom to top) increases \(y\).
Testing
Java Tests
The src/test/java file contains four test files. For the purposes of testing Part I, you should try out TestRasterAPIHandler. We also provide TestRouter and TestRouterTiny for Part II, and TestDirections for part IV.
These tests are to help save you time. In an ideal world, we’d have more time to get you to write these tests yourself so that you’d deeply understand them, but we’re giving them to you for free. You should avoid leaning too heavily on these tests unless you really understand them! The staff will not be able to explain individual test failures that are covered elsewhere in the spec, and you are expected to be able to resolve test failures using the skills you’ve been learning all semester to effectively debug.
Ineffective/inappropriate strategies for debugging: running the JUnit tests over and over again while making small changes each time, staring at the error messages and then posting on Piazza asking what they mean rather than carefully reading the message and working to understand it.
Effective strategies include: using the debugger; reproducing the buggy inputs in a simpler file that you write yourself; rubber ducky debugging, etc.
You can feel free to modify these files however you want. We will not be testing your code on the same data as is given to you for your local testing - thus, if you pass all the tests in this file, you are not guaranteed to pass all the tests on the actual autograder.
Map Tests
It can be hard to use the provided map.html file to debug, since it involves user input and is generally complicated.
Thus, we’ve also provided html test files in the static/simple folder. These are test.html, testTwelveImages.html, and test1234.html that you can use to test your project without using the front-end. Whereas map.html is a fully featured interactive website, these special test html files make a hard-coded call to your RasterAPIHandler. You can modify the query parameters in these files. These files allow you to make a specific call easily.
If you decide you want to debug using the fully featured map.html, you may find your browser’s Javascript console handy: on Windows, in Chrome you can press F12 to open up the developer tools, click the network tab, and all calls to your MapServer should be listed under type xhr, and if you mouse-over one of these xhr lines, you should see the full query appear, for example (click for higher resolution): 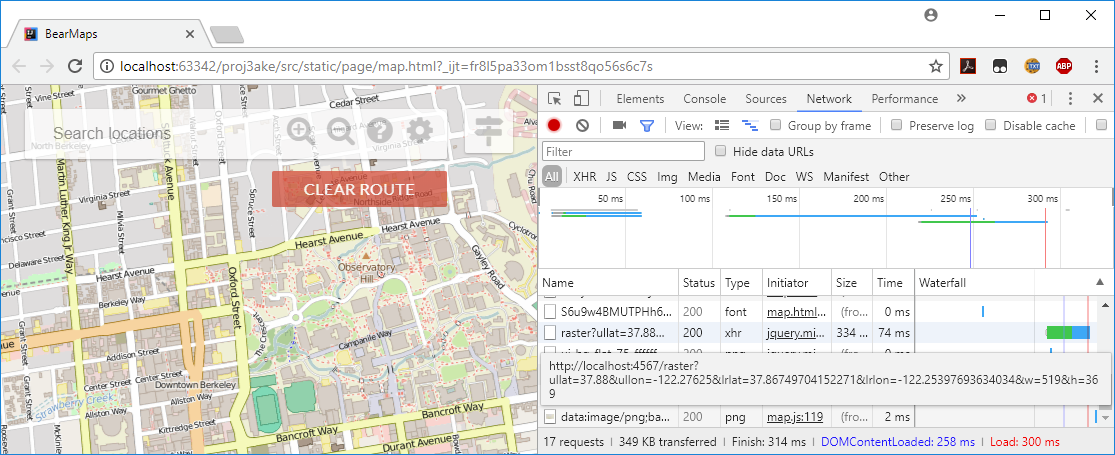
You can also see the replies from your MapServer in the console tab, e.g. (click for higher resolution) 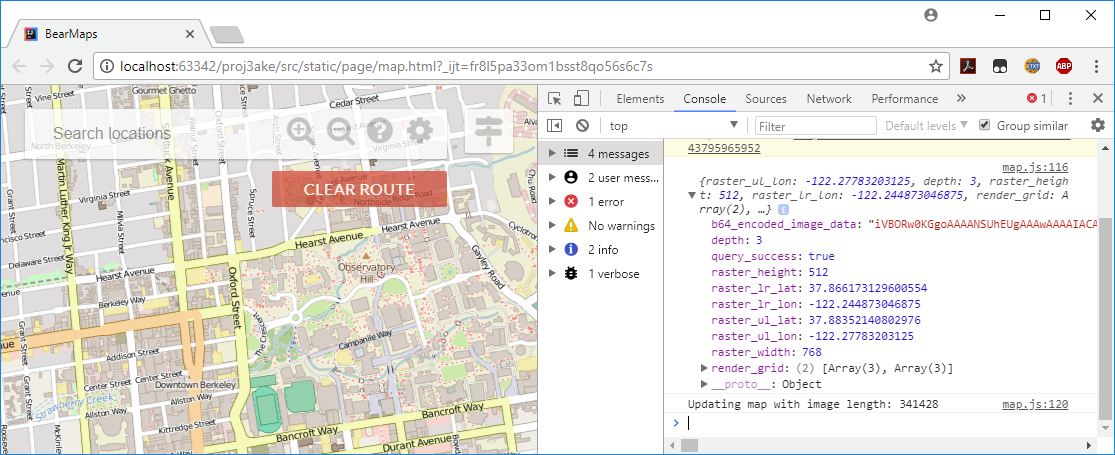
II. Routing & Location Data (Required)
In this part of the project, you’ll implement the A* algorithm, which, in conjunction with data structures that you built in previous labs, will be used to provide street directions.
First, you’ll implement your A* algorithm in a file called AStarSolver. Then, you’ll give functionality to the AugmentedStreetMapGraph class. Finally, you’ll uncomment the shortestPath method in the Router class.
II(a). The A* Algorithm
In this part, we’ll be implementing an A* solver, an artificial intelligence that can solve arbitrary state space traversal problems. Specifically, given a graph of possible states, your AI will find the optimal route from the start state to a goal state. A* can be used to solved a wide variety of problems, including finding driving directions, solving a 15 puzzle, and finding word ladders, though we will focus on the first.
AStarGraph
Problems to be solved by your AI will be provided in the form a graph. More specifically, they will be given as a class that implements AStarGraph. This simple interface is given below.
package bearmaps.utils.graph;
public interface AStarGraph<Vertex> {
/* Provides a list of all edges that go out from V to its neighbors. */
List<WeightedEdge<Vertex>> neighbors(Vertex v);
/* Provides an estimate of the "distance" to reach the goal from
the start position. For results to be correct, this estimate must
be less than or equal to the correct "distance". */
double estimatedDistanceToGoal();
}
This interface captures a huge swath of real world problems, including all the problems described in the introduction.
Additionally, the WeightedEdge<Vertex> class represents a directed edge from an object of type Vertex to another object of type Vertex. The WeightedEdge class has the API below:
package bearmaps.utils.graph;
public class WeightedEdge<Vertex> {
/* The source of this edge. */
public Vertex from()
/* The destination of this edge. */
public Vertex to()
/* The weight of this edge. */
public double weight()
}
As seen above, every AStarGraph object must be able to return a list of all edges that point out from a given vertex (using the neighbors method), and it must have a method to return the estimated “distance” between any two vertices (estimatedDistanceToGoal, this estimate is called a heuristic in lecture).
As an example, neighbors(E) would return a list of three edges for this graph from lecture:
from():E,to():C,weight()1from():E,to():F,weight()4from():E,to():G,weight()5
For this same lecture graph, estimatedDistanceToGoal(C, G) would yield 15.
The A* Algorithm
Memory-Optimizing A*
This spec will not describe the A* algorithm in sufficient detail for you to be able to complete this assignment. Make sure you understand how A* works as described in lecture before reading further. For your convenience, see this link.
In theory, the version of A* that we described in lecture will work. However, recall that this version of the algorithm requires that we start with a priority queue that contains every possible vertex. This is often impossible in practice due to the memory limits of real computers. For example, suppose our graph corresponds to every state in a 15 puzzle. There are trillions of possible configurations for a 15 possible, so we cannot explicitly build such a graph.
To save memory, we will implement a different version of A* with one fundamental difference: Instead of starting with all vertices in the PQ, we’ll start with only the start vertex in the PQ.
This necessitates that we also change our relaxation operation. In the version from lecture, a successful relaxation operation updated the priority of the target vertex, but never added anything new. Now that the PQ starts off mostly empty, a successful relaxation must add the target vertex if it is not already in the PQ.
We will also make a third but less important change: If the algorithm takes longer than some timeout value to find the goal vertex, it will stop running and report that a solution was unable to be found. This is done because some A* problems are so hard that they can take e.g. billions of years and terabytes amounts of memory (due to a large PQ) to solve.
To summarize, our three differences from the lecture version are:
- The algorithm starts with only the start vertex in the PQ.
- When relaxing an edge, if the relaxation is successful and the target vertex is not in the PQ, add it.
- If the algorithm takes longer than some timeout value, it stops running.
Algorithm Pseudocode
In pseudocode, this memory optimized version of A* is given below:
- Create a PQ where each vertex v will have priority value p equal to the sum of v’s distance from the source plus the heuristic estimate from v to the goal, i.e. p = distTo[v] + h(v, goal).
- Insert the source vertex into the PQ.
- Repeat while the PQ is not empty, PQ.peek() is not the goal, and timeout is not exceeded:
- p = PQ.poll()
- relax all edges outgoing from p
And where the relax method pseudocode is given as below:
- relax(e):
- p = e.from(), q = e.to(), w = e.weight()
- if distTo[p] + w < distTo[q]:
- distTo[q] = distTo[p] + w
- if q is in the PQ: PQ.changePriority(q, distTo[q] + h(q, goal))
- if q is not in PQ: PQ.insert(q, distTo[q] + h(q, goal))
Note: You’ll want to keep track of the distance and edge to each node somehow, make sure that these structures are initialized properly, and do the correct checks before accessing these structures.
A demo of this algorithm running can be found at this link.
A demo showing A* from lecture running side-by-side with memory optimized A* can be found at this link. This example is also run on a more interesting graph than the earlier example.
Some interesting consequences of these changes:
- In the lecture version, once a vertex was removed from the PQ, it was gone forever. This meant that each vertex was visited at most one time. In this new version of A*, the algorithm can theoretically revisit the same vertex many times.
- Beyond the scope of our course: As a side effect of the consequence above, admissibility is a sufficient condition for correctness for the memory optimized version of A*. For the version in lecture, we needed a stronger criterion for our heuristic called consistency. Take CS188 if you’d like to learn more. You are not expected to know about admissibility and consistency on the exams (though we might still have problems that cover them, we’ll just make sure to re-introduce the terms from scratch if we do so).
Exercise: Implementation
Create an AStarSolver class in the bearmaps.utils.graph directory with the following API:
public class AStarSolver<Vertex> implements ShortestPathsSolver<Vertex> {
public AStarSolver(AStarGraph<Vertex> input, Vertex start, Vertex end, double timeout)
public SolverOutcome outcome()
public List<Vertex> solution()
public double solutionWeight()
public int numStatesExplored()
public double explorationTime()
}
The constructor and methods should work as follows:
AStarSolver: Constructor which finds the solution, computing everything necessary for all other methods to return their results in constant time. Note thattimeoutpassed in is in seconds.result: Returns one ofSolverOutcome.SOLVED,SolverOutcome.TIMEOUT, orSolverOutcome.UNSOLVABLE. Should be SOLVED if the AStarSolver was able to complete all work in the time given. UNSOLVABLE if the priority queue became empty before finding the solution. TIMEOUT if the solver ran out of time. You should check to see if you have run out of time every time you dequeue.solution: A list of vertices corresponding to a solution. Should be empty if result was TIMEOUT or UNSOLVABLE.solutionWeight: The total weight of the given solution, taking into account edge weights. Should be 0 if result was TIMEOUT or UNSOLVABLE.numStatesExplored: The total number of priority queuepoll()operations. Should be the number of states explored so far if result was TIMEOUT or UNSOLVABLE.explorationTime: The total time spent in seconds by the constructor.
Note: Since AStarGraph<Vertex> uses a generic type for vertices, the input graph’s vertices may be a reference type. Thus, make sure to use the equals method whenever you want to compare two vertices for equality.
Note that the result class returns an object of type SolverOutcome. If you open this file, you’ll see that this is a special entity known as an enum which is very similar to a class. Basically, an enum is just a type that stores exactly one of several possible constants, and has no methods.
If you’d like to use your MinHeapPQ from lab14 to implement your AStarSolver, copy the files MinHeapPQ.java and MinHeap.java from lab14 into bearmaps.utils.pq. If you did not complete lab14, or you just aren’t sure if your MinHeapPQ works correctly, you may use our provided DoubleMapPQ, which also implements PriorityQueue. Note that DoubleMapPQ is slower and more memory hungry than MinHeapPQ, but it still has log time operations, so will still be good enough for this project.
Your goal is to implement an AStarSolver, but an example solver is given as LazySolver.java. This solver tries the first edge it sees and if that edge doesn’t lead to the solution, it (incorrectly) claims that the puzzle is unsolvable. You might find LazySolver helpful as a reference as you are implementing AStarSolver.
However, DO NOT COPY AND PASTE LazySolver INTO AStarSolver AND TRY TO ADAPT IT. This is likely only going to make you miserable later when you try to debug something that you didn’t write yourself and don’t understand.
II(b). AugmentedStreetMapGraph
The next task is to implement a few methods in the AugmentedStreetMapGraph class.
AugmentedStreetMapGraph extends the provided StreetMapGraph class. StreetMapGraph is also a AStarGraph<Long>, since the former implements the latter’s interface. Listed below are the methods provided by StreetMapGraph.
public List<WeightedEdge<Long>> neighbors(Long v);
public double estimatedDistanceToGoal(Long s, Long goal);
void addNode(Node node);
void addWeightedEdge(long fromID, long toID, String name);
public double lon(long v);
public double lat(long v);
public String name(long v);
protected List<Node> getNodes();
Note: For StreetMapGraph’s, each vertex will be a Long corresponding to a physical location in Berkeley. Each vertex will have a latitude, longitude, and optionally, a name, and will represent either a named place (e.g. Bongo Burger, vertex #318886222) or a spot along a road (e.g. this spot on Ridge street, vertex #318886232). Not all vertices have names (such as the spot on Ridge street above) and many vertices don’t have edges (specifically those that correspond to places rather than spots along a road). For example, neighbors(318886222) would return an empty list, since Bongo Burger is a place.
Note that 5 of these methods are public, 2 of them are package-private (can only be used by other classes in the same package), and 1 is “protected”, which means that subclasses, even from another package, are able to access the variable.
In part II and part III of this project, you will be implementing a few more methods in AugmentedStreetMapGraph that will make it more useful for efficiently handling routing (and autocomplete) queries. Specifically, you will be implementing the following methods:
public long closest(double lon, double lat) \\ part II
public List<String> getLocationsByPrefix(String prefix) \\ part III
public List<Map<String, Object>> getLocations(String locationName) \\ part III
Exercise: closest(double lon, double lat)
Implement the long closest(double lon, double lat) method so that it efficiently finds the long value equal to the vertex number of the vertex closest to the given lon and lat.
Since closest will be used for finding street routes, you should only consider vertices that have neighbors when calculating closest. For example, if a user clicks at position 37.875613, -122.26009, the closest method should return 1281866063, which has position 37.8756072, -122.2602582, rather than 318886222, which has position 37.875613, -122.260097, even though the distance to 1281866063 is greater than to 318886222. This is because vertex 318886222 (which corresponds to Bongo Burger) has no neighbors since its not a place along a road.
This method must complete in \(\log(N)\) time, where \(N\) is the number of nodes in the graph. To achieve this runtime, you’ll need to use the KDTree (which you implemented in lab) or the WeirdPointSet (which has been provided to you). Both of these classes implement the PointSet interface, and you may assume that the nearest method of these classes runs in \(\log(N)\) time.
If you’d like to use your KDTree from lab, copy the file into the bearmaps.utils.ps directory. If not, feel free to use the provided WeirdPointSet.
Note: Node objects are not Point objects, so you won’t be able to make a KDTree of Nodes. To address this, here are some possibilities:
- Use a map to go between
Nodes andPoints. - Make
KDTreetake a generic type (arguably a little more difficult and less elegant).
Exercise: shortestPath
Your last task is to implement the shortestPath method of the Router class. All you will have to do here is uncomment the given lines and write an import statement that makes your code compile!
Testing
Now, you can test your Router by running the provided TestRouterTiny and TestRouter files in the bearmaps.test directory!
III. Autocomplete (Extra Credit)
This part of the project is optional, and can be completed for 5 points of extra credit. The autograder for this portion will be released next week.
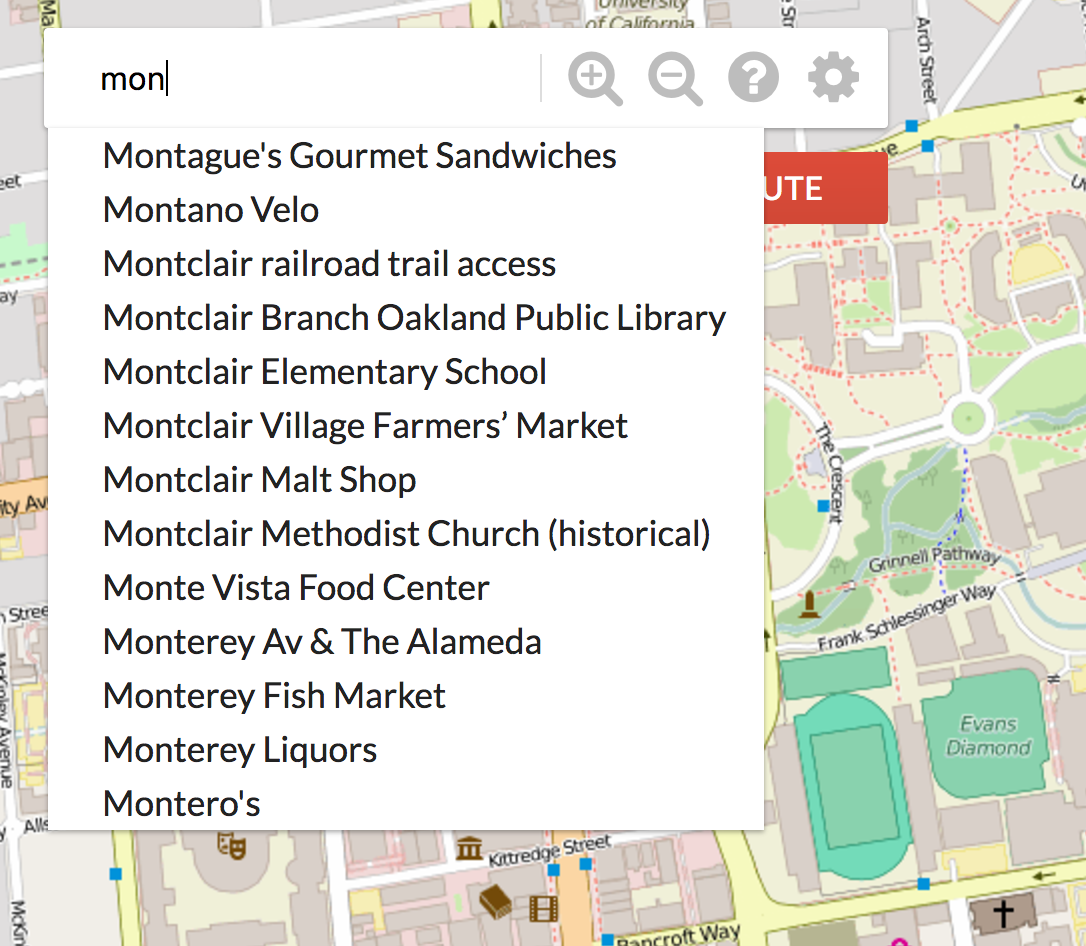
Exercise: getLocationsByPrefix
We would like to implement an Autocomplete system where a user types in a partial query string, like “Mont”, and is returned a list of locations that have “Mont” as a prefix. To do this, implement getLocationsByPrefix in AugmentedStreetMapGraph.java, where the prefix is the partial query string.
The prefix will be a cleaned name for search. That is:
- everything except characters A through Z and spaces removed, and
- everything is lowercased.
This method should return a list containing the full names of all locations whose cleaned names share the cleaned query string prefix, without duplicates.
Runtime
Assuming that the lengths of the names are bounded by some constant, querying for prefix of length s should take O(k) time where k is the number of words sharing the prefix. As with Part II’s closest operation, you’ll need to add some sort of additional data structure as an instance variable to your AugmentedStreetMapGraph in order to support this operation efficiently.
Exercise: getLocations
The user should also be able to search for places of interest. Implement getLocations in AugmentedStreetMapGraph which collects a List of Maps containing information about the matching locations - that is, locations whose cleaned name match the cleaned query string exactly. This is not a unique list and should contain duplicates if multiple locations share the same name (i.e. Top Dog, Bongo Burger). See the Javadocs for the information each Map should contain.
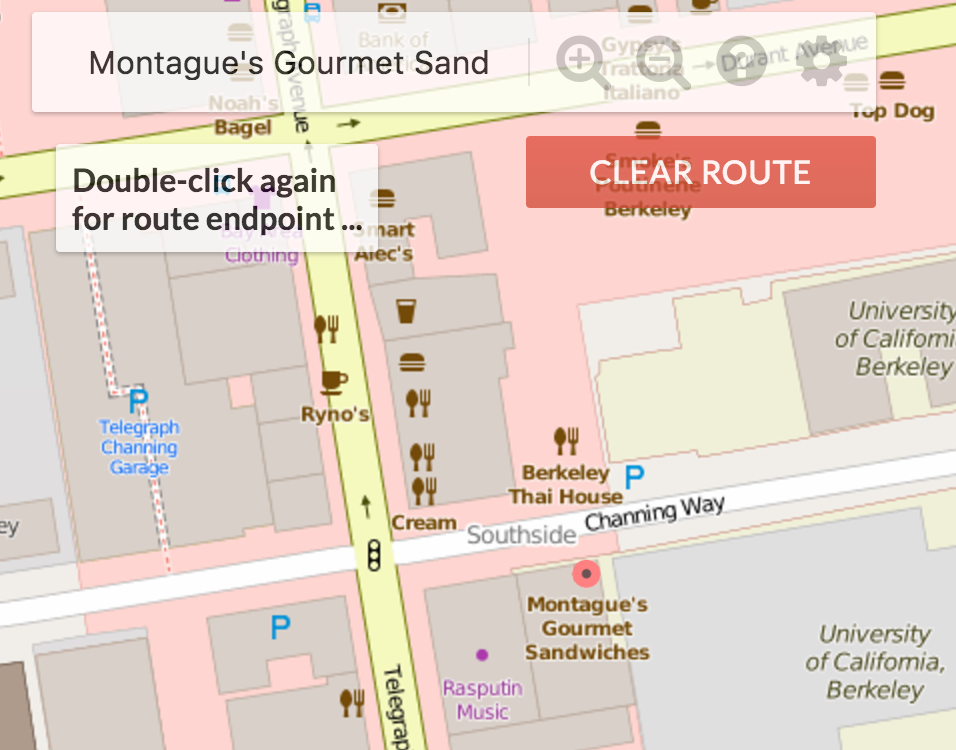
Implementing this method correctly will allow the web application to draw red dot markers on each of the matching locations. Note that because the location data is not very accurate, the markers may be a bit off from their real location. For example, the west side top dog is on the wrong side of the street!
Runtime
Suppose there are k results. Your query should run in O(k) time.
IV. Turn-by-turn Navigation (Optional)
As an optional extra-challenging feature that is not for credit, you can use your A* search route to generate a sequence of navigation instructions that the server will then be able to display when you create a route. To do this, implement the additional method routeDirections in your Router class. This part of the project is not worth any points (even gold points), but it is awfully cool.
To save effort, you’ll want to use various methods in the NavigationDirections class, for example Bearing.
How we will represent these navigation directions will be with the NavigationDirection object defined within Router.java. A direction will follow the format of “DIRECTION on WAY for DISTANCE miles”. Note that DIRECTION is an int that will correspond to a defined String direction in the directions map, which has 8 possible options:
- “Start”
- “Continue straight”
- “Slight left/right”
- “Turn left/right”
- “Sharp left/right”
What direction a given NavigationDirection should have will be dependent on your previous node and your current node along the computed route. Specifically, the direction will depend on the relative bearing between the previous node and the current node, and should be as followed:
- Between -15 and 15 degrees the direction should be “Continue straight”.
- Beyond -15 and 15 degrees but between -30 and 30 degrees the direction should be “Slight left/right”.
- Beyond -30 and 30 degrees but between -100 and 100 degrees the direction should be “Turn left/right”.
- Beyond -100 and 100 degrees the direction should be “Sharp left/right”.
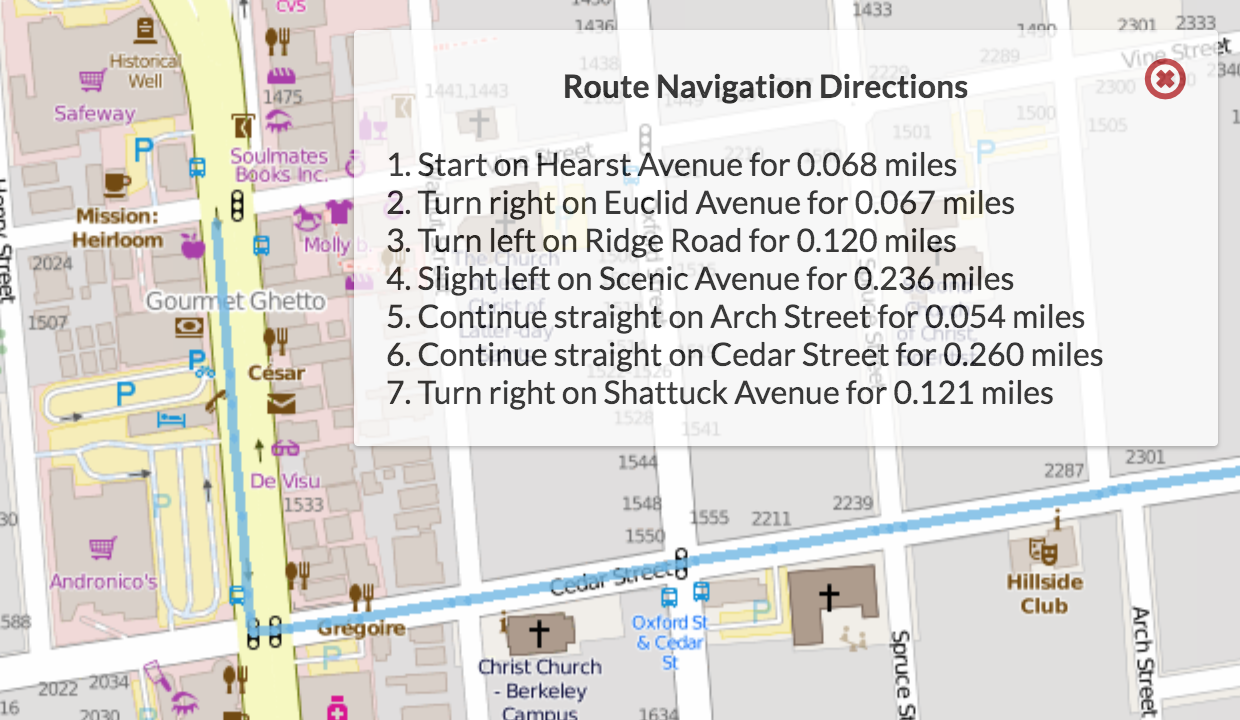
The navigation will be a bit complicated due to the fact that the previous and current node at a given point on your route may not necessarily represent a change in the “way” that you’re currently on, where a way is the name of a street or path that you’re currently travelling along. That is, if your route is from vertex 38623 to 2398471 to 1239871, these might all be the same street, and driving directions aren’t useful if they keep saying “Go straight on Shattuck. Go Straight on Shattuck. Go straight on Shattuck.” As a result, what you will need to do as you iterate through your route is keep track of when you actually change ways, and if so generate the correct distance for the NavigationDirection representing the way you were previously on, add it to the list, and continue. If you happen to change ways to one without a name, it’s way should be set to the constant “unknown road”.
As an example, suppose when calling routeDirections for a given route, the first node you remove is on the way “Shattuck Avenue”. You should create a NavigationDirection where the direction corresponds to “Start”, and as you iterate through the rest of the nodes, keep track of the distance along this way you travel. When you finally get to a node that is not on “Shattuck Avenue”, you should make sure NavigationDirection should have the correct total distance travelled along the previous way to get there (suppose this is 0.5 miles). As a result, the very first NavigationDirection in your returned list should represent the direction “Start on Shattuck Avenue for 0.5 miles.”. From there, your next NavigationDirection should have the name of the way your current node is on, the direction should be calculated via the relative bearing, and you should continue calculating its distance like the first one.
After you have implemented this properly you should be able to view your directions on the server by plotting a route and clicking on the button on the top right corner of the screen.
V. Going Even Further (Optional)
You’re welcome to go even further. If you come up with something cool, let us know.
Heroku Deployment
You will be able to deploy your street mapping application to the web.
Instructions for deploying on Heroku will be uploaded here soon.
FAQ
I provided the correct String[][] output but it doesn’t show up!
In order for something to show up on test.html, you need to set query_success to true, and in order for something to show up on map.html all the parameters must be set.
I checked every element of map I return with RasterAPIHandler.processRequest and they’re all correct, but still nothing is appearing.
If you’re using notation that you learned somewhere that looks like {{}} to initialize your map, you should not be doing so. Double-braces notation is an unintended “feature” of Java that is actually a terrible plan for a number of reasons.
My initial map doesn’t fill up the screen!
If your monitor resolution is high & the window is fullscreen, this can happen. Refer to the reference solution to see if yours looks similar.
Zooming out behaves weirdly
This is a known issue in the front end and is not your code’s fault. We’re hoping to fix this ASAP.
I don’t draw the entire query box on some inputs because I don’t intersect enough tiles.
That’s fine, that’ll happen when you go way to the edge of the map. For example, if you go too far west, you’ll never reach the bay because it does not exist.
I’m getting funky behavior with moving the map around, my image isn’t large enough at initial load, after the initial load, I can’t move the map, or after the initial load, I start getting NaN as input params.
These all have to do with your returned parameters being incorrect. Make sure you’re returning the exact parameters as given in the project 3 slides or the test html files.
I’m failing the local router tests and I don’t know why. It says java.lang.AssertionError: The test says: Expected: [760706748, 3178363987, …], but Actual:[]
This is probably because you are including locations of places like Bongo Burger in your KdTree (or WeirdPointSet). As noted in the spec above, when handling a call to closest, you should only include vertices that have neighbors, otherwise closest may a return a node with no neighbors, which is trivially unable to act as a useful starting or ending node (since it literally cannot be reached).
I sometimes pass the timing tests when I submit, but not consistently.
If you have a efficient solution: it will always pass. I have yet to fail the timing test with either my solution or any of the other staff’s solutions over a lot of attempts to check for timing volatility.
If you have a borderline-efficient solution: it will sometimes pass. That’s just how it is, and there really isn’t any way around this if we want the autograder to run in a reasonable amount of time.
How do query boxes or bounding boxes make sense on a round world?
For the rastering part of the project, we assume the world is effectively flat on the scale of the map you’re looking at. In truth, each image doesn’t cover a rectangular area, but rather a “spherical cap”.
I’m missing xml files and/or library-su19 is not updated.
Go into the library-su19 directory and try the commands git submodule update --init followed by git checkout master.
My getLocations method works fine and I get markers on the map when I click on a search result but the Autograder test for getLocations method fails.
Try verifying that your getLocations method works for the cleaned strings as well other than the unclean strings
I pass all the local tests, but I’m getting a NoSuchElementException in the autograder
The autograder uses randomized sources and targets. Some targets may not be reachable from all sources. In these cases, you can do anything you want (e.g. return an empty list of longs) except let your program crash.
Submission
The autograder will be released by the beginning of next week. In the meantime, you should use client side tests (test.html, map.html, the provided JUnit tests, etc.).
Note: We have your git configured to avoid pushing all the extra stuff we don’t care about, e.g. html files DO NOT submit or upload to git any xml or png files. Attempting to do so will eat your internet bandwidth and possibly even crash your computer.
Resources
FileDisplayDemo: FileDisplayDemo.html
Spring 2019 reference version: http://bearmaps3.herokuapp.com/map.html
Spring 2017 reference version: http://grigomaps.herokuapp.com/map.html
Acknowledgements
Data made available by OSM under the Open Database License. JavaSpark web framework and Google Gson library.
Alan Yao for creating the original version of this project. Colby Yuan and Eli Lipsitz for substantial refactoring of the front end. Rahul Nangia for substantial refactoring of the back end.